常见的机械臂控制由数控发展而来,强调运动过程恒速稳定,很多控制器的速度控制采用混合式PID,在启动阶段产生极大的加速度以求快速到达所设定速度,由于固体本身的刚度,这种剧烈的速度变化对于数控加工场景或一般的固体搬运场景非常有效。但在液体搬运场景却会产生极大的影响,因此需要提出新的控制方法。这种控制方法必须对加速度有较高的要求,为了量化这种加速度性能,需要有一个用于测试机械臂末端运动稳定的器件。
验证算法的桌面机械臂是一种小型机械臂,因此末端加速度测量装置必须轻便且小型。此外为了避免线缆对运动的影响,测量装置必须拥有独立的供电体系以及基于无线传输数据,SensorTile.box完美切合了这个需求。只需要把读取到的数据上传到上位机即可分析数据,包括绘制出实时波形、最值分析等等。
设计完整说明:https://bbs.eeworld.com.cn/thread-1130941-1-1.html

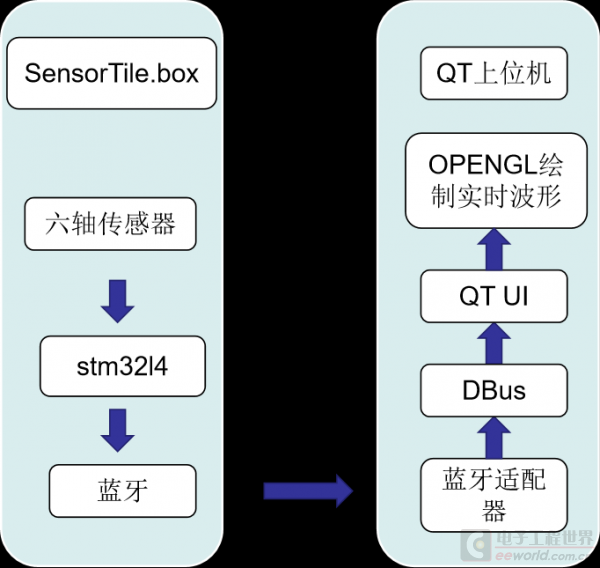
解决方案框图
!注意:请使用浏览器自带下载,迅雷等下载软件可能无法下载到有效资源。
| 器件 | 类型 | 描述 | 数据手册 |
|---|---|---|---|
| lsm6dsox | MEMS和传感器 | iNEMO 6DoF惯性测量单元(IMU),具有高级数字功能和有限状态机。用于电池供电的IoT、游戏、可穿戴设备和消费电子。超低功耗和高精度 | 点击下载 |

欢迎加入EEWorld参考设计群,也许能碰到搞同一个设计的小伙伴,群聊设计经验和难点。 入群方式:微信搜索“helloeeworld”或者扫描二维码,备注:参考设计,即可被拉入群。 另外,如您在下载此设计遇到问题,也可以微信添加“helloeeworld”及时沟通。

EEWorld Datasheet 技术支持
 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved


 ACPL-K73A-500E
ACPL-K73A-500E






