长时间出差不在家,家里的金鱼会挨饿。因此,为了让金鱼在主人不在家的时候不会挨饿,基于4自由度机械手臂和GD32E231设计一款基于自动投喂机器人。
GD32E231通过生成PWM来控制机械臂,同时按照预先设定的时间,从固定地方去取鱼食,放入鱼缸,通过多次人工训练,让机械臂根据人工训练的数据,实现自动计算投喂取食位置。
同时还可以增加一些辅助功能,通过串口或者板载ADC加上光敏电阻来大概获取GD32E231的内部温度和鱼缸周围光照情况,天黑暗时可以打开台灯等照明设备。
该系统采用了GD32E231的以下功能:
1. UART 高性能异步通信接口
2. GPIO 通用输入输出接口
3. 72MHz主频
4. RTC实时时钟
5. Timer0定时器触发DMA传输
6. DMA传输
7. Timer2 启动四通道PWM来连接机械臂
8. 外部中断ETI
9. ADC 内部模数转换
从实际测试效果和项目推进过程中所用的模块具体运行情况来看,GD32E231这款处理器,定时器功能强大,定时器2可以输出4路PWM,而且ADC功能也很实用,可用于普通的机器人应用。

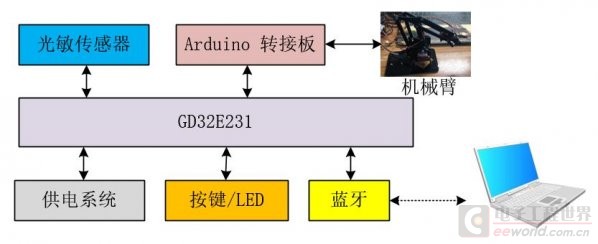
解决方案框图
!注意:请使用浏览器自带下载,迅雷等下载软件可能无法下载到有效资源。
| 器件 | 类型 | 描述 | 数据手册 |
|---|---|---|---|
| GD32E231C8T6 | 单片机 | GD32E231CxT6 ARM® Cortex®-M23 32-bit MCU | 点击下载 |

欢迎加入EEWorld参考设计群,也许能碰到搞同一个设计的小伙伴,群聊设计经验和难点。 入群方式:微信搜索“helloeeworld”或者扫描二维码,备注:参考设计,即可被拉入群。 另外,如您在下载此设计遇到问题,也可以微信添加“helloeeworld”及时沟通。

EEWorld Datasheet 技术支持
 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved


 TSUP5M45SH S1G
TSUP5M45SH S1G






