在生活水平高度现代化的今天,吸尘器已经成了清洁家庭的智慧家庭必备小家电。吸尘器是利用电机高速运转,形成空气负压,使尘箱内局部真空,从而吸附尘屑这一运作原理完成清扫的一种现代清洁工具。主要由起尘、吸尘、滤尘三部分组成。本文简单介绍基于MM32SPIN25的无传感弦波驱动技术于“手持式吸尘器”的应用实例。
方案特色:
ARM Cortex-M0高性能电机驱动专用芯片
主频高达96MHz
内建32位硬件除法器
内建多组比较器和运放
180度无传感弦波驱动
电机转速可达100000rpm (2极电机)
速度命令输入可为模拟电压或PWM信号, 並可由FG反饋實際轉速
定转速或恒功率运转
支持多种数据通信接口:UART IIC SPI
完整的保护机制: 过流保护、过压保护、欠压保护、过温保护、堵转保护、进风口堵塞保护
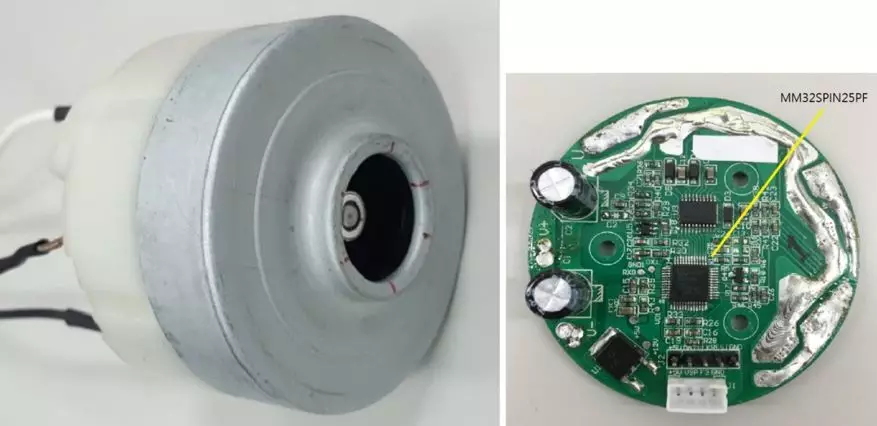
图1. 左图:常见的25.2V/380W手持式吸尘器电机;
右图:采用MM32SPIN25PF之驱动板
2. 无传感弦波驱动技术原理
于此介绍无传感弦波驱动的技术原理与实现方法.
下图2为弦波磁场导向驱动电机控制框图。流程一开始是由外部输入讯号读取目标速度命令, 经过闭回路加速度斜率控制器运算后, 得到可提供速度PI控制器的速度命令,接着用此速度命令与反馈的实际速度, 经由PI 控制器计算之后产生力矩电流命令Iq。
磁场导向控制器(FOC)功能方块接收到此力矩电流命令及电机的估测角度后, 经过三相电流的反馈、坐标转换、 电流环PI计算、及空间矢量调制(SVPWM)等法则运算, 由此获得要逼近目标转速所需求的三相PWM占空比数据, 之后将此数据产生PWM输出给予外部的电力驱动组件, 以此驱动电机运转。
在磁场导向控制器功能方块产生PWM 讯号的过程中, 滑模估测器(SMO)功能方块负责产生电机运转所需要的估测角度及速度。
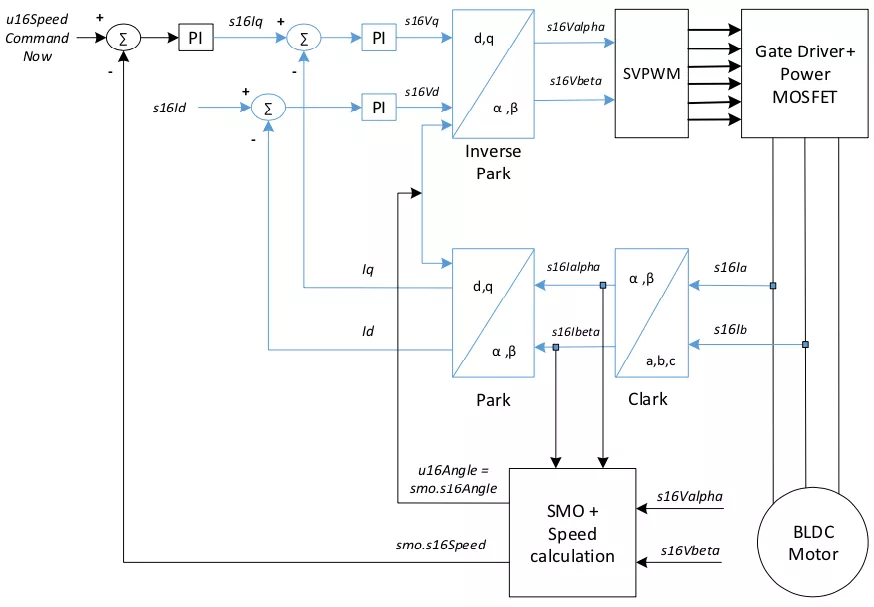
图2. 无传感弦波磁场导向(FOC)软件控制框图
下图3为滑模角度估测系统细部的框图, 滑模角度估测器由四个主要功能方块所组成。首先由电流估测器产生估测电流, 并用此估测电流与量测的实际电流Ialfa, Ibeta的差值, 经过bang-bang 控制与低通滤波功能方块运算后, 产生估测的BEMF电压值Ealfa, Ebeta, 将此估测的电压值经过反正切的计算后即可得到估测的转子角度。
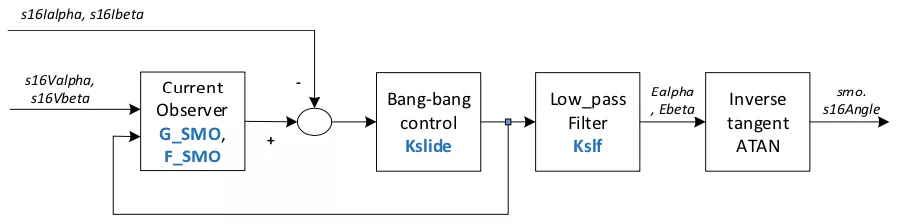
图3. 滑模估测(SMO)转子角度估测软件控制框图
本方案的磁场导向控制(FOC)主要有三个坐标转换计算, Clarke转换、Park转换及逆变换Park转换, 目的是要能够控制电机的磁场电流Id及力矩电流Iq, 以实现电机的转速控制。这个理论是由F. Blaschke 在1972年所提出的。
Clarke 坐标转换:
目的是将三相电流的三轴(a, b, c)坐标系统转换为2轴坐标系统。以下算式为Clarke 坐标转换方程式。
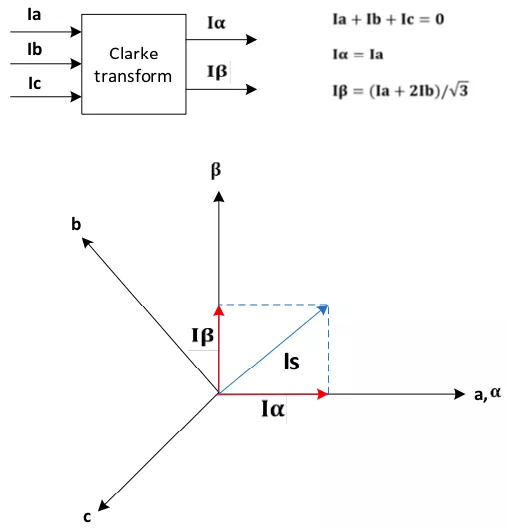
图4. Clarke 坐标转换及其方程式
Park 坐标转换:
将静态的2轴坐标系统转换为电机同步旋转的2轴(d, q)坐标系统。d轴表转子磁通电流方向及大小, q轴表力矩电流。以下算式为Park 坐标转换方程式。
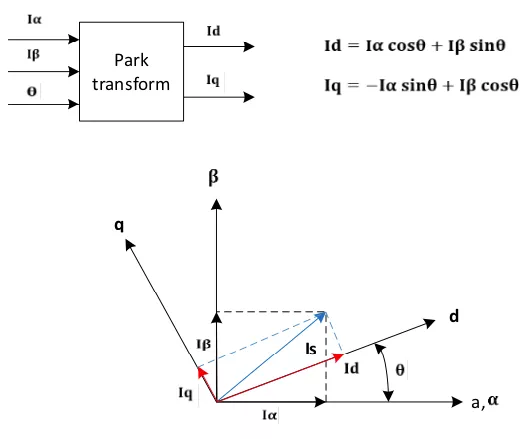
图5. Park 坐标转换及其方程式
逆变换Park 的坐标转换:
将电机同步旋转的2轴(d, q)坐标系统转换回静态的2轴坐标系统。以下算式为逆变换Park的坐标转换方程式。
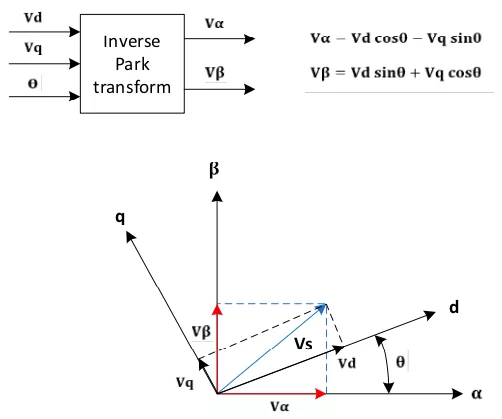
图6. 逆变换Park 坐标转换及其方程式
3. 硬件设计
MM32SPIN25PF内建的比较器和运放,简化了电机驱动板的设计.手持式吸尘器电机驱动板的参考原理图如下:
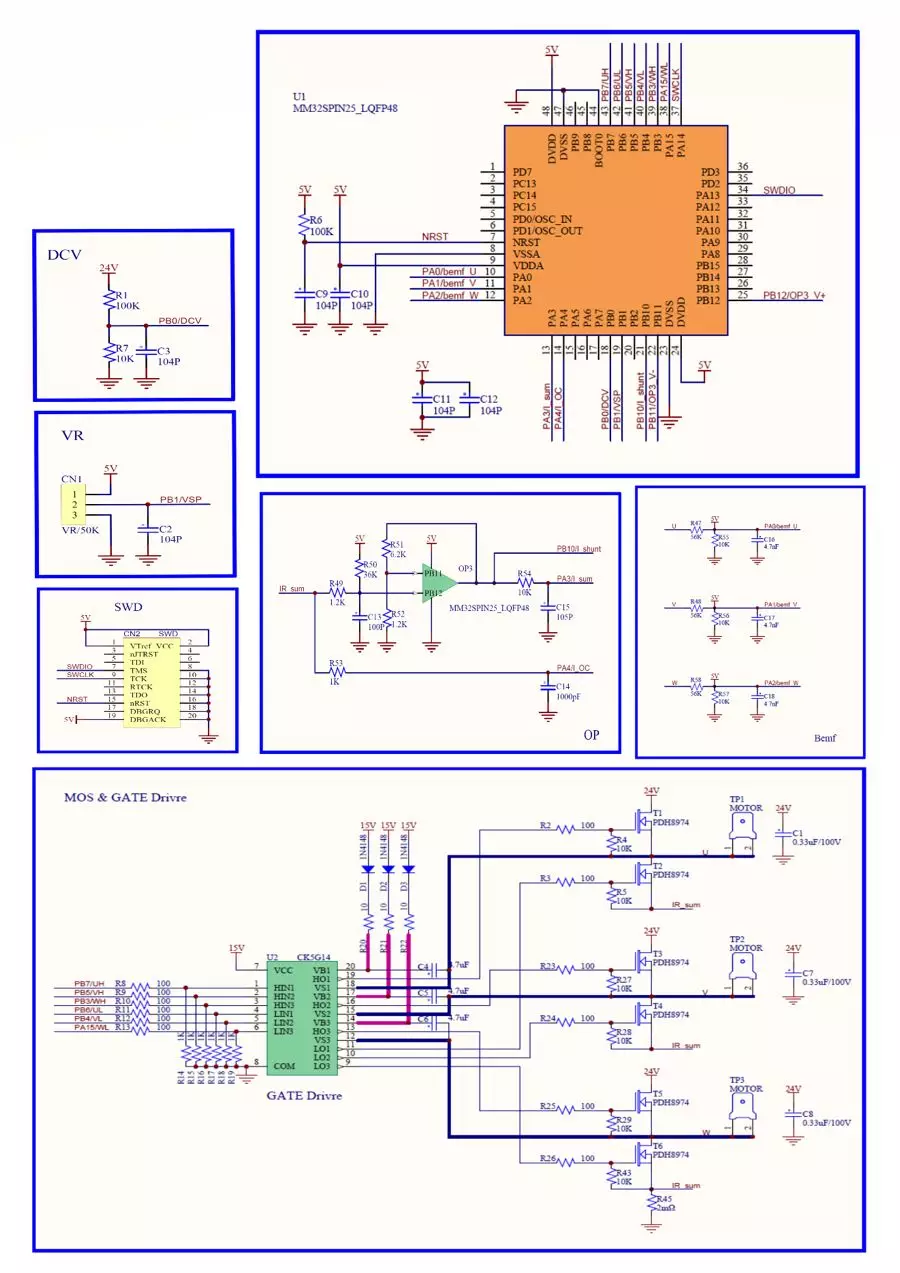
图7. 基于MM32SPIN25PF的手持式吸尘器
电机驱动板原理图
4. 弦波驱动的相电流波形
本应用案例采用180度弦波驱动,在300W运转下的相电流波形如下:
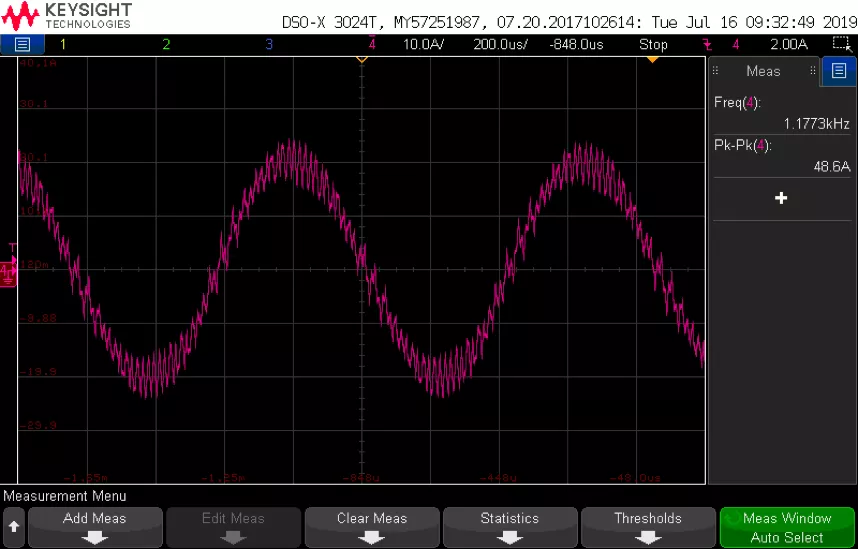
图8. 300W运转下的弦波相电流波形
堵住进风口时的转速可达100000rpm,弦波相电流波形如下:
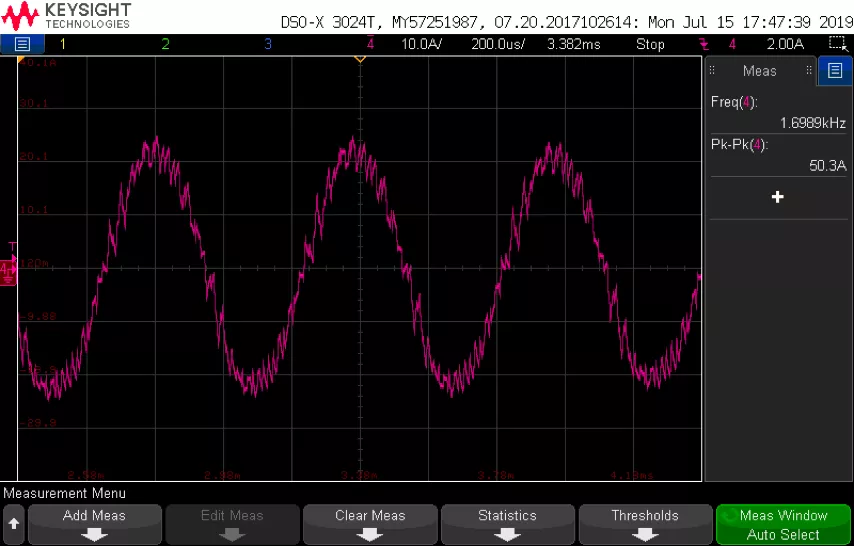
图9. 进风口堵塞时的相电流波形
5. 结论
MM32SPIN25PF是灵动微电子推出的高性能电机驱动专用芯片,高达96MHz的主频及32位硬件除法器能满足无传感磁场导向(FOC)弦波算法的高速运算需求。其内建的比较器和运放,更大大地简化了电机驱动板的设计,减少了整套方案BOM成本。

欢迎加入EEWorld参考设计群,也许能碰到搞同一个设计的小伙伴,群聊设计经验和难点。 入群方式:微信搜索“helloeeworld”或者扫描二维码,备注:参考设计,即可被拉入群。 另外,如您在下载此设计遇到问题,也可以微信添加“helloeeworld”及时沟通。

EEWorld Datasheet 技术支持
 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved


 ATXMEGA64A4U-AN
ATXMEGA64A4U-AN






