GLPX4-ESP32项目主页
将PX4移植到ESP32上是我一直有的一个想法,在得知NuttX已经支持ESP32以后我也开启了移植PX4的项目。历经了几个月的痛苦折磨终于在单核上成功运行并可以稳定飞行。虽有诸多不足,但也算是对自己一直有的这个想法的一个交待了。
现在仅将ESP32单核移植并试飞成功,双核经过尝试后有诸多问题,仍未解决。
请确保使用小轴距四轴进行测试。由于单核负载已达98%,且有诸多位置问题无法解决,所以确保安全不要在大轴距飞行器上使用。
现在使用的是ESP32模块的FLASH机型参数保存,经测试有一定概率丢失配置。
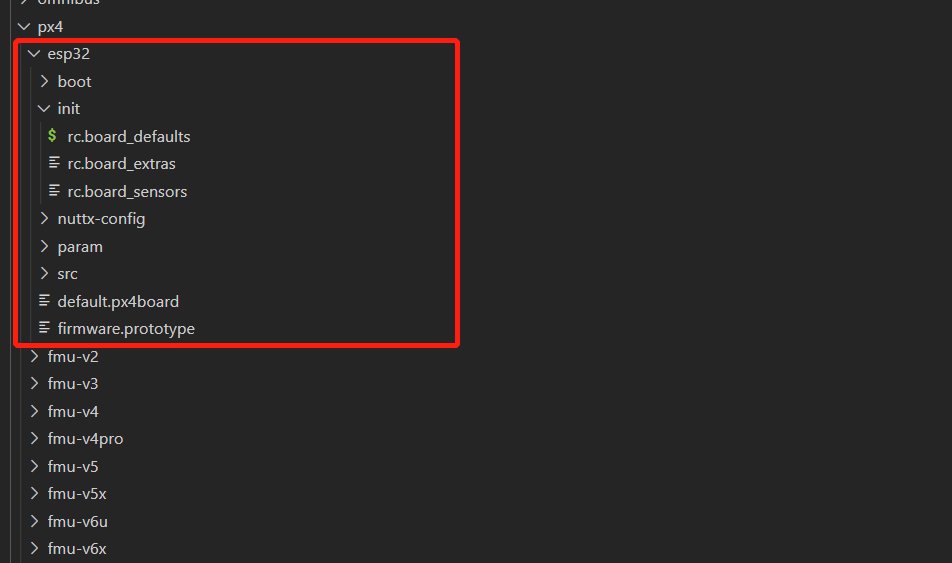
支持ESP32的PX4源码 【请使用single_core_esp32分支】
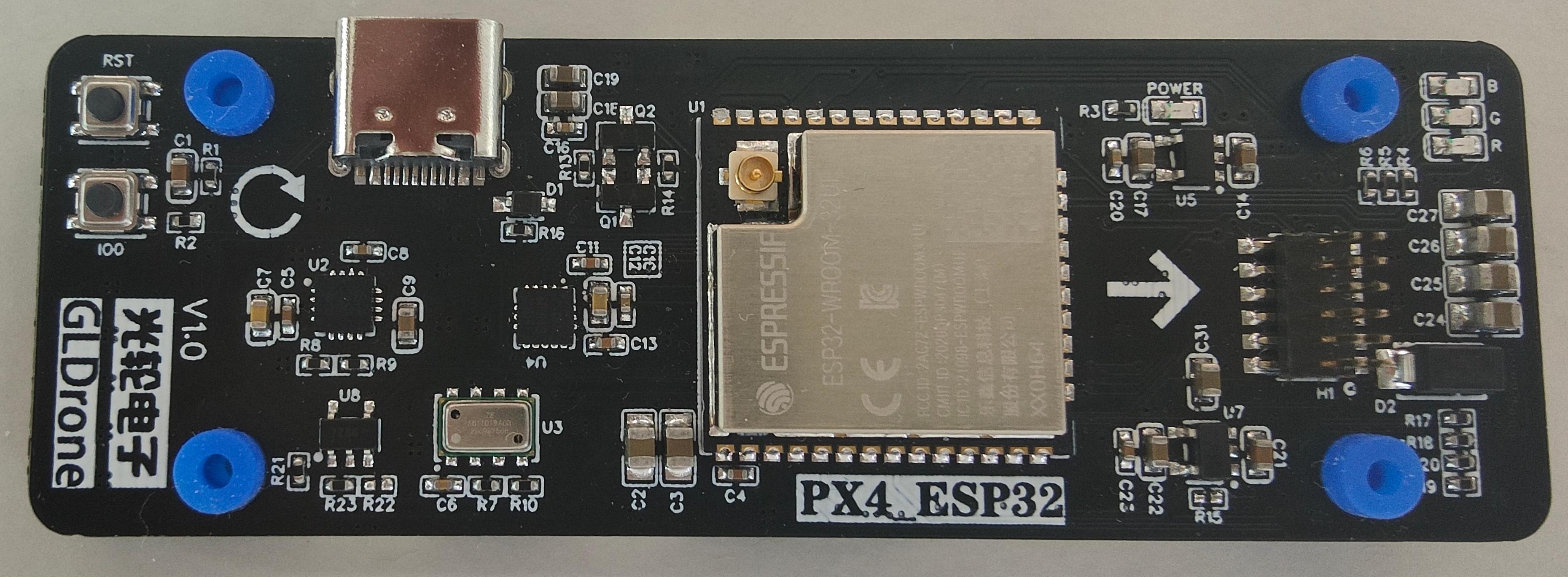
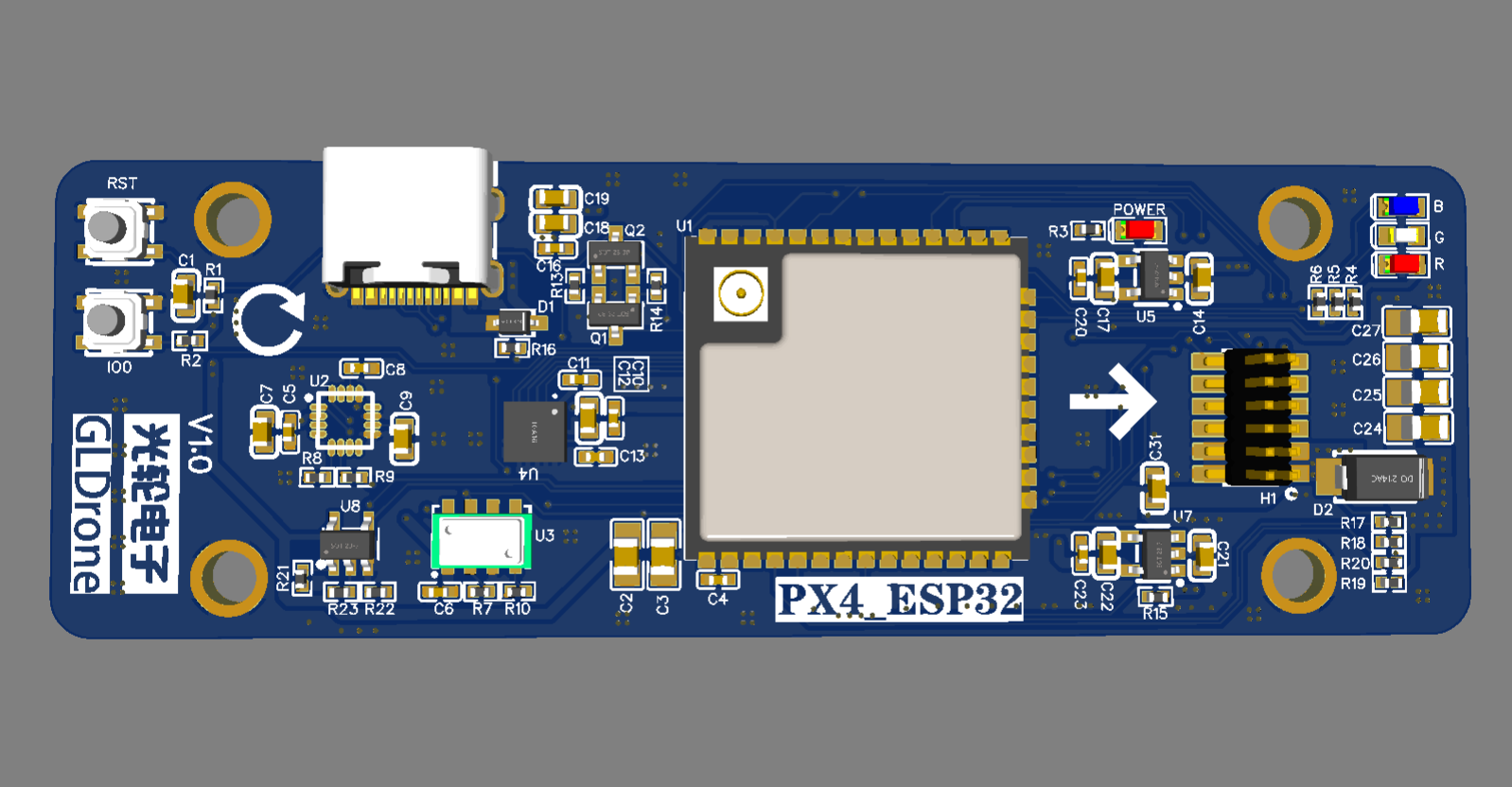
PCB和原理图 【立创EDA】
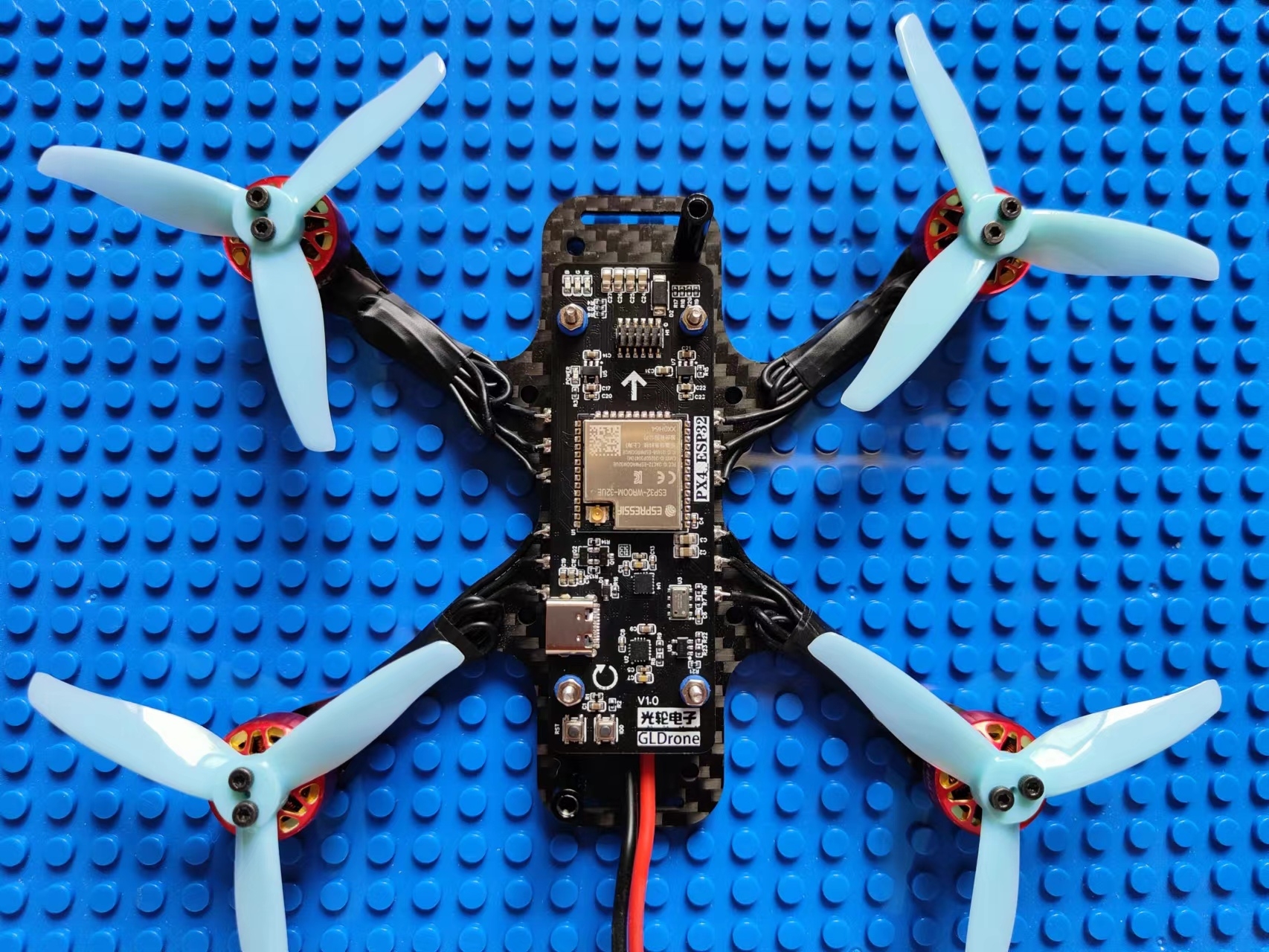
开源的小机架以及电调请移步开源四旋翼飞行器GLDrone
QGC可参考的配置文件
!!! note
请首先学习掌握PX4源码编译的方法!更多可阅读PX4文档https://docs.px4.io/master/en/dev_setup/building_px4.html
xtensa-esp-elf编译器xtensa-esp-elfgit clone https://github.com/guanglun/PX4-Autopilot.git --recursive -b single_core_esp32
make px4_esp32_default
编译成功如下: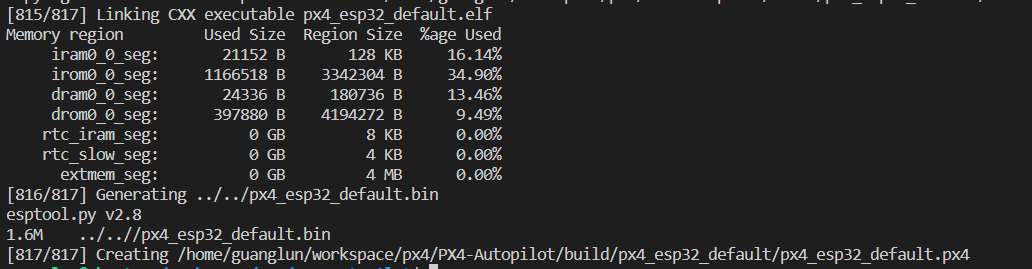
./Tools/flash_esp32.sh -f true
./Tools/flash_esp32.sh
run top cmd: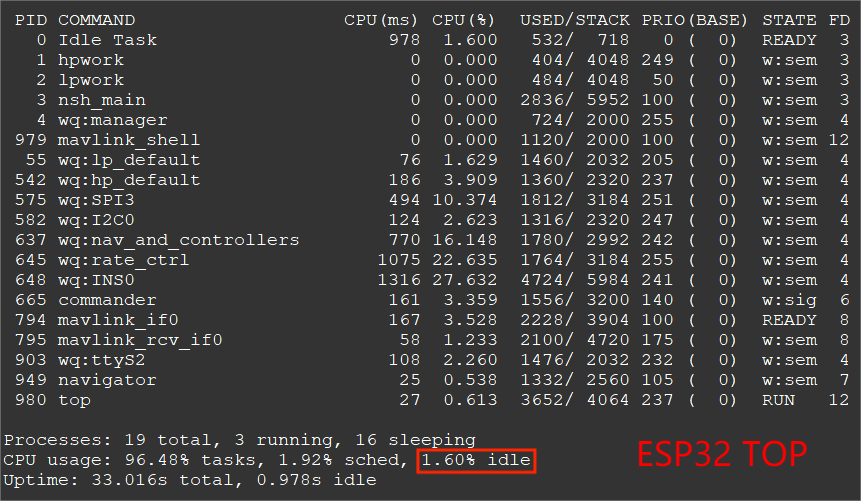
run uorb top cmd: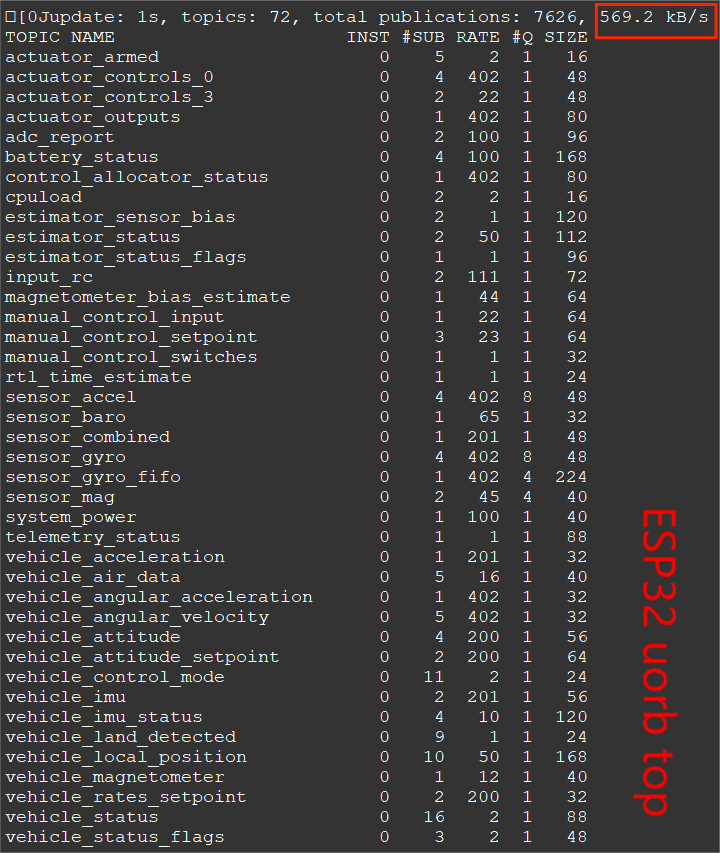
https://www.bilibili.com/video/BV1VZ4y1h7sa/

!注意:请使用浏览器自带下载,迅雷等下载软件可能无法下载到有效资源。
| 器件 | 类型 | 描述 | 数据手册 |
|---|---|---|---|
| GRT188R71E105KE13D | 贴片电容(MLCC) | 点击下载 | |
| GRT21BD71A226ME13L | 贴片电容(MLCC) | 点击下载 | |
| NFM15PC104D0J3D | 馈通电容滤波器 | 点击下载 | |
| SC0603J2002F2BNRH | 贴片电阻 | 点击下载 | |
| SC0603J3002F2BNRH | 贴片电阻 | 点击下载 | |
| SCR0402F12K | 贴片电阻 | 点击下载 | |
| RC0402JR-7W1KL | 贴片电阻 | 点击下载 | |
| TS3320A | 轻触开关 | 点击下载 | |
| ESP-32S | WIFI模块 | WiFi+蓝牙4.2+双核CPU,ESP32 | 点击下载 |
| GRT188R61H225KE13D | 贴片电容(MLCC) | 点击下载 | |
| GRM188R61C475MAAJD | 贴片电容(MLCC) | 点击下载 | |
| CRG0402F10K | 贴片电阻 | 点击下载 | |
| RMC04022.2K1%N | 贴片电阻 | 点击下载 | |
| QMI8658A | 姿态传感器/陀螺仪 | 点击下载 | |
| GRT188R61C106KE13D | 贴片电容(MLCC) | 点击下载 | |
| RB551V-30 D | 肖特基二极管 | 二极管配置:独立式 直流反向耐压(Vr):30V 平均整流电流(Io):500mA 正向压降(Vf):470mV@500mA 反向电流(Ir):100μA@20V D(D表示丝印) | 点击下载 |
| DSK24 | 肖特基二极管 | 点击下载 |

欢迎加入EEWorld参考设计群,也许能碰到搞同一个设计的小伙伴,群聊设计经验和难点。 入群方式:微信搜索“helloeeworld”或者扫描二维码,备注:参考设计,即可被拉入群。 另外,如您在下载此设计遇到问题,也可以微信添加“helloeeworld”及时沟通。

EEWorld Datasheet 技术支持
 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved


 ATSAME70Q21B-CFN
ATSAME70Q21B-CFN






