N32G430C8L7
微控制器产品采用高性能 32 位 ARM Cortex™-M4F 内核,集成浮点运算单元(FPU)和数字信号处理(DSP),支持
并行计算指令。最高工作主频 128MHz,集成高达64KB 片内加密存储 Flash,并支持多用户分区权限管理,支持 16KB 的嵌入式 SRAM。内置一个内部高速 AHB 总线,两个低速外设时钟总线 APB 及
总线矩阵,支持40个可复用 I/Os,提供丰富的高性能模拟接口,包括 1 个 12 位 4.7Msps ADC,支持16个外部输入通道和3个内部通道,同时提供多种
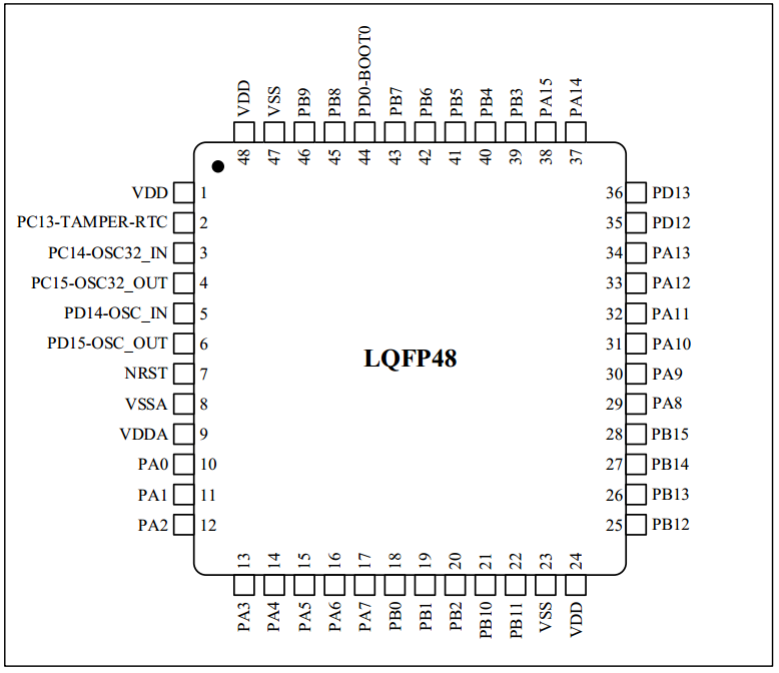
数字通信接口,包括 4个U(S)ART、2个I2C、2个SPI/I2S、1个CAN 2.0B通信接口。N32G430C8L7 微控制器产品可稳定工作于-40°C 至+105°C 的温度范围,供电电压 2.4V至 3.6V,提供多种功耗模式供用。下图是N32G430C8L7微控制器的引脚分布图;
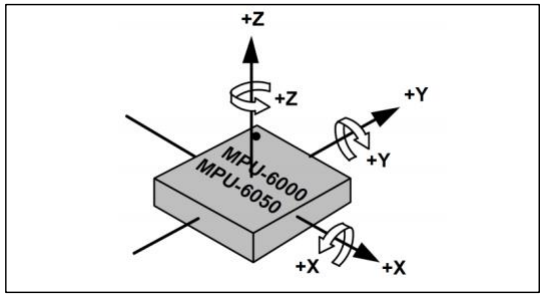
MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了安装空间。MPU6050内部整合了3轴陀螺仪和3轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器( DMP: Digital Motion Processor)硬件加速引擎,通过主 IIC 接口,向应用端输出完整的9轴融合演算数据。有了DMP,我们可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,降低了处理运算对操作系统的负荷,同时大大降低了开发难度。
如上图所示,这里我们的MCU通过这个I2C接口(IIC_SCL/IIC_SDA连接MCU的 PB13/PB14)来控制 MPU6050,AD0是从I2C接口(接 MCU)的地址控制引脚,该引脚控制IIC 地址的最低位。如果接 GND,则 MPU6050 的 IIC 地址是:0x68,如果接VDD,则是0x69,本项目中,该引脚直连到MCU的PB2,软件是直接拉低的,故MPU6050的I2C地址为 0x68。
说明: 为了利于I2C协议的学习,本例程的MPU6050的驱动代码采用的时GPIO模拟的I2C接口。
注意: 这里的地址是不包含数据传输的最低位的(最低位用来表示读写)!
2.MPU6050 初始化配置流程
1. 初始化 IIC 接口:
初始化与 MPU6050 连接的SDA和SCL数据线,设置AD0为低电平,进而选择I2C地址为0x68。
2. 复位 MPU6050:
这一步让 MPU6050内部所有寄存器恢复默认值,通过对电源管理寄存器1(0X6B)的bit7写1 实现。复位后,电源管理寄存器1恢复默认值(0X40),然后必须设置该寄存器为0X00,以唤醒MPU6050,进入正常工作状态。
3. 设置角速度传感器(陀螺仪)和加速度传感器的满量程范围:
这一步,我们设置两个传感器的满量程范围(FSR),分别通过陀螺仪配置寄存器(0X1B),和加速度传感器配置寄存器(0X1C)设置。我们一般设置陀螺仪的满量程范围为± 2000dps,加速度传感器的满量程范围为±2g。
4. 设置其他参数:
这里,我们还需要配置的参数有:关闭中断、关闭 AUX IIC接口、禁止FIFO、设置陀螺仪采样率和设置数字低通滤波器(DLPF)等。本章我们不用中断方式读取数据,所以关闭中断,然后也没用到AUXIIC接口外接其他传感器,所以也关闭这个接口。分别通过中断使能寄存器(0X38)和用户控制寄存器(0X6A)控制。MPU6050可以使用 FIFO 存储传感器数据,不过本章我们没有用到,所以关闭所有FIFO 通道,这个通过 FIFO使能寄存器(0X23)控制,默认都是0(即禁止FIFO),所以用默认值就可以了。陀螺仪采样率通过采样率分频寄存器(0X19)控制,这个采样率我们一般设置为 50 即可。数字低通滤波器(DLPF)则通过配置寄存器(0X1A)设置,一般设置 DLPF 为带宽的 1/2 即可;
5. 配置系统时钟源并使能角速度传感器和加速度传感器:
系统时钟源同样是通过电源管理寄存器1(0X1B)来设置,该寄存器的最低三位用于设置系统时钟源选择,默认值是0(内部8MRC震荡),不过我们一般设置为 1,选择x轴陀螺 PLL作为时钟源,以获得更高精度的时钟。同时,使能角速度传感器和加速度传感器,这两个操作通过电源管理寄存器 2(0X6C)来设置,设置对应位为0可开启;
3.MPU6050 重要寄存器说明
该部分可以参考《MPU-6000 & MPU-6050 寄存器表及其描述(中文版)》文档
4.DMP 使用
从MPU6050相关寄存器中,我们可以读出加速度传感器和角速度传感器的原始数据。不过这些原始数据,对想搞四轴之类的初学者来说,用处不大,我们期望得到的是姿态数据,也就是欧拉角:航向角( yaw)、横滚角( roll)和俯仰角( pitch)。有了这三个角,我们就可以得到当前四轴的姿态,这才是我们想要的结果。要得到欧拉角数据,就得利用我们的原始数据,进行姿态融合解算,这个比较复杂,知识点比较多,初学者 不易掌握。而 MPU6050 自带了数字运动处理器,即 DMP,并且,InvenSense 提供了一个MPU6050 的嵌入式运动驱动库,结合 MPU6050 的 DMP,可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到yaw、roll和 pitch。使用内置的 DMP,大大简化了四轴的代码设计,且 MCU 不用进行姿态解算过程,大大降低了 MCU 的负担,从而有更多的时间去处理其他事件,提高系统实时性。
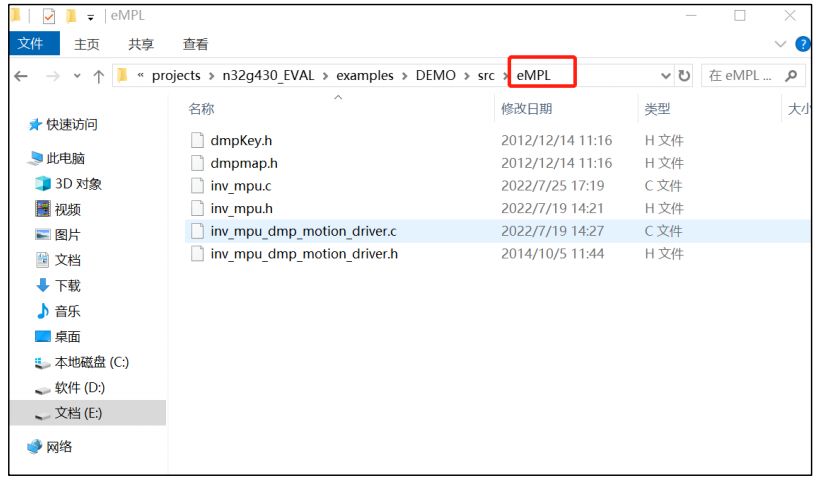
官方 DMP 驱动库移植起来,还是比较简单的,首先将inv_mpu.c 和inv_mpu_dmp_motion_driver.c两个文件加入到工程中,其次实现这 4 个函数:i2c_write,i2c_read, delay_ms 和 get_ms,具体细节,我们就不详细介绍了,移植后的驱动代码,我们放在本例程src eMPL 文件夹内,总共 6 个文件,如图下图所示:
其中我们在 inv_mpu.c 添加了几个函数,方便我们使用,重点是两个函数:mpu_dmp_init 和mpu_dmp_get_data 这两个函数,这里我们简单介绍下这两个函数。u8 mpu_dmp_init(void);//mpu初始化,注意:这个函数比较耗时,大概3-4s,无实测。u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw);获取姿态数据pitch,roll,yaw。该函数的具体实现可以参考源码注释。
MPU6050淘宝上买8块多,很不错,性能也很好。

3.2 OLED 模块
1.OLED 模块硬件连接
如上图7所示,这里我们的MCU通过IIC接口(OLED_SCL/ OLED_SDA连接MCU的 PA4/PA5)来控制OLED的显示。为了尽快熟悉N32G430这颗芯片,OLED的I2C驱动,本案例采用的是硬件I2C1。如上图6所示,该OLED模块背面的地址选择电阻跳到了左边,那么它的从机地址为0x78。注意:这里的地址是不包含数据传输的最低位的(最低位用来表示读写)!
2.OLED 初始化配置流程
1. 初始化 IIC 接口
初始化与 OLED 连接的SDA和SCL数据线。
2. 关闭OLED显示,设置OLED寄存器参数
关闭OLED显示之后,配置寄存器的参数,例如设置时钟分频因子,震荡频率,设置显示对比度,扫描方向,预充电周期,亮度等参数,具体含义可以参考OLED的寄存器说明文档,或者网上其他资料,这里就不做具体的阐述。
3. 开启OLED显示
4.3 OLED 重要寄存器说明
该部分可以参考一下网址:https://wenku.baidu.com/view/fb23e3a4bfeb19e8b8f67c1cfad6195f302be849.html;
OLED淘宝买十来块钱。
四、空间坐标转换算法
4.1 三维坐标系转换
空间中三维坐标变换一般由以下三种方式实现:
以上的矩阵算法,可以参考百度相关的资料,由于代码中由于立方体的 x,y 轴与传感器的x,y轴方向不一致,代码将Rx,Ry做了交换,以保证 OLED 的立方体的方向与传感器的方向一致,从而将姿态调整一致。由于要将立体的坐标点显示在二维平面上,故假如点 P(x0,y0,z0),需要将 P 点 XOY平面上投影,即 z0 = 0,即在平面上的 P1 坐标为(x0,y0)。基于以上的分析,则如果要显示立方体在平面上,那么只要将转换后的立方体八个坐标点,投影到 XOY 平面上,然后依次连接以上点,即可以得到一个立方体。本例程为了突出显示立方体姿态变化,故多连接了一个x型面。
五、软件设计流程
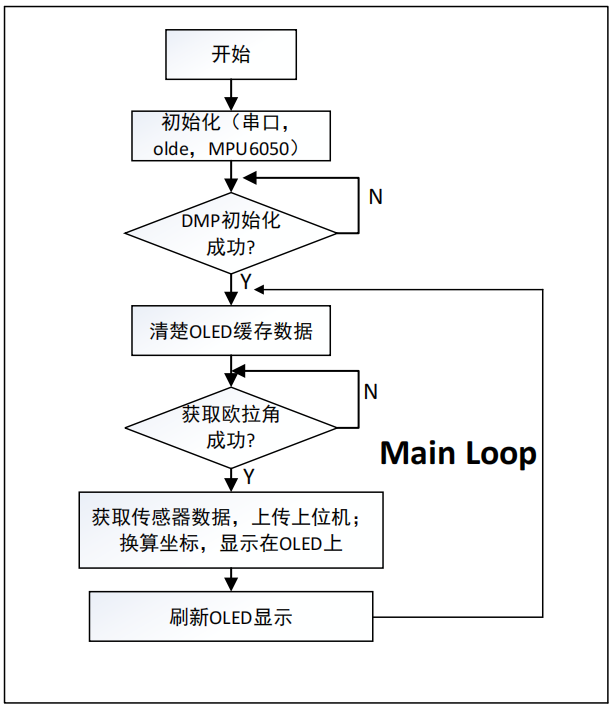
5.1 软件流程图
软件的初始化流程分为以下几个步骤:
-
初始化:
部分包括串口,硬件 IIC,GPIO 模拟 I2C,OLED,MPU6050 以及 DMP 初始化; -log_init():500000Bd, no parity, 8-bit data,1 stop bit。该接口可以收发数据以及 log 打印;-i2c_master_init ():为了提高 OLED 的刷新速度, IIC 速度设置为 400k,无 ACK 应答的方式;-oled_init():主要是 OLED 的寄存器参数配置,具体可以参考 SSD1306 控制器;-MPU_Init():配置 MPU6050 的寄存器参数配置,包括地址,采样率,加速度/陀螺仪满量程范围等参数的配置。-mpu_dmp_init():DMP 初始化,这里等待 DMP 的初始化完成.






 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved









 TMD37253
TMD37253






