


安森美对话NODAR:未来自动驾驶的关键技术与愿景
本文作者: NODAR 首席执行官兼创始人Leaf Jiang、 安森美 汽车图像感知部门技术与产品战略高级经理 Sergey Velichko
NODAR 和安森美通力合作,共同实现了远距离、超精确的物体检测,例如能够探测到距离车辆 150 米甚至更远处道路上的小型障碍物,如石头、轮胎或木材等,这为速度高达 130 公里/小时的 L3 级自动驾驶功能确立了新的标准。
结合这两家企业的突破性技术,除了实现超长距离 3D 感知之外,还能够确保车辆更安全地行驶于夜间、恶劣天气、未铺设路面或不平坦地形,大大提升道路安全性。我们的共同努力不仅有望提高车辆性能,还将重新定义未来自动驾驶汽车的功能,让汽车能够无缝集成各种技术。
在此次合作中,我们整合了安森美和 NODAR 的前沿技术,显著增强了 3D 感知系统的功能,为汽车行业树立了新的性能标杆。
Sergey Velichko(安森美): “安森美以创新为核心使命,始终致力于推动先进驾驶辅助系统 (ADAS) 和自动驾驶 (AD) 应用领域实现突破。我们的 Hyperlux 技术提供更好的低光性能和更宽的高动态范围 (HDR),在各种汽车温度下都能实现出色的图像质量和稳定性。我们的联合方案采用了两个 800 万像素 Hyperlux 传感器,具有高分辨率和 150 dB 高动态范围,支持更长距离检测。与标准单摄像头系统相比,检测距离增加了一倍。这是前向感知应用必不可少的功能,并且同样适用于夜间环境,增强了探测较小物体的能力,并在具挑战性的环境条件下也能保持优异性能。”
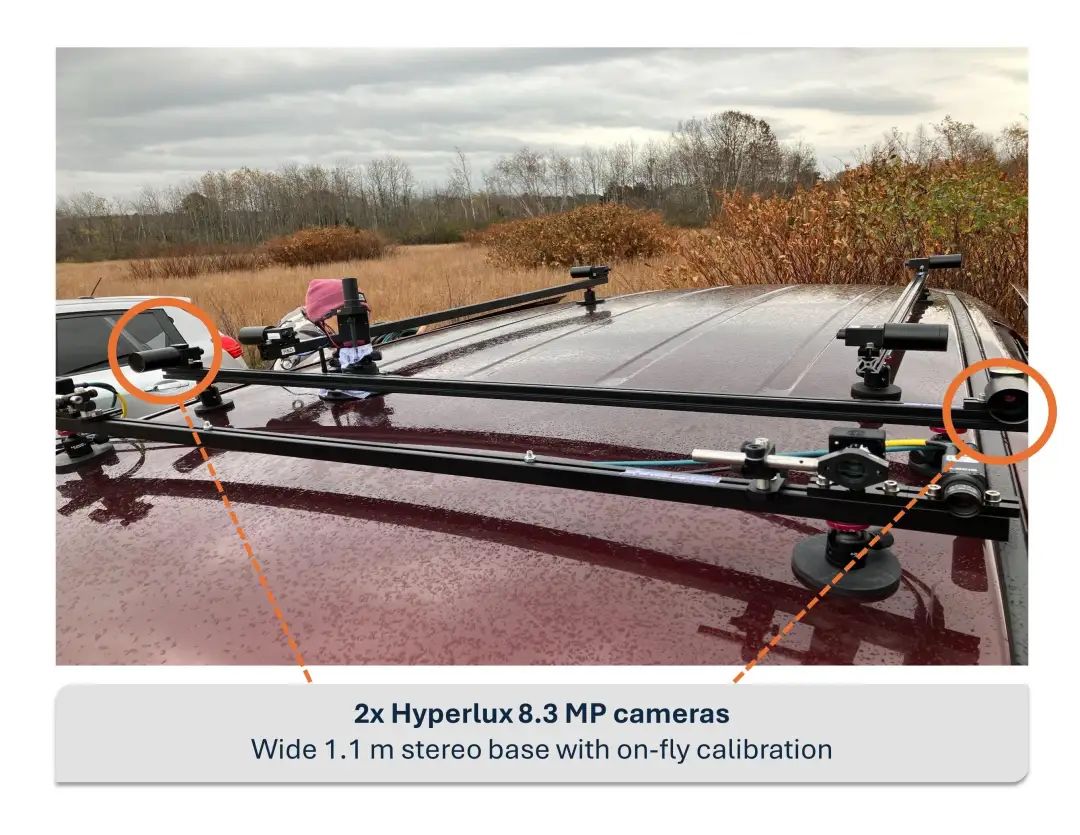
图 1:NODAR 和安森美联合开发的宽立体视觉系统
Leaf Jiang (NODAR): “NODAR 在立体视觉领域的突破性进展与安森美的杰出技术相得益彰。我们的技术支持逐帧自动校准,可在 22 个维度上优化两个摄像头的相对姿态,并达到精确的亚像素精度。凭借实时操作和每帧图像校准,NODAR 技术能够在高振动、低光照和恶劣天气等各种条件下保持理想性能。”
安森美与 NODAR 合作开发的先进 3D 检测技术对于高速公路和铁路等高速环境尤为重要。因为在这些环境中,高速行驶的车辆和火车都需要相当长的时间和距离才能完全停下或做出避障决策。例如,如果某处轨道上有障碍物,火车可能需要提前 1,000 米或更长的距离才能完全停下来。
我们的联合解决方案满足了必要的探测范围和预警时间要求,可以检测到 1,000 米开外的障碍物并作出反应,由此便能及时有效地应对潜在危险,防止事故发生,提高行驶安全性。其中的远距离物体检测功能需依赖于由摄像头捕捉的高分辨率清晰图像,并借助复杂信号处理技术来调整图像和提取深度信息。
Sergey Velichko(安森美): “我们的 Hyperlux 传感器采用了超曝光像素专利技术,可在所有光照条件下增强色彩保真度和图像清晰度,实现精确的边缘检测。超曝光像素中使用的溢出技术可扩展动态范围,在明亮场景中捕捉到真实色彩,同时在低光下保持出色灵敏度。其中的 LED 闪烁消除功能在白天和黑夜同样高效,这进而又大大提高了图像质量。结合 NODAR 的高分辨率立体视觉技术,我们在检测物体尺寸和距离方面实现了更高的精度。
Leaf Jiang (NODAR): “我们改进了 Hyperlux 传感器的宽基线立体配置和实时校准特性,这对于在长距离和动态条件下保持高精度非常重要。我们的实时校准技术可以不断优化立体图像对,这也是实现精确远距离检测的关键。”
安森美和 NODAR 合作推出了基于摄像头的深度感知方案,可通过立体图像对来计算物体距离。这种方法优化了恶劣天气下的检测能力,并几乎在所有光照条件下都可保持可靠性能。得益于安森美 Hyperlux 传感器的高动态范围 (HDR) 和出色的低光性能,与其他深度感知技术(如激光雷达)相比,NODAR 的立体视觉系统能够通过立体成像技术,以更低的成本达到更高的深度精度。
Sergey Velichko(安森美): “Hyperlux 技术将图像传感器暗噪声降低至亚电子水平,在低能见度和恶劣天气下表现出色。得益于此,即使在超低光条件下,例如乡村道路上或仅使用前大灯时,传感器也能清晰地捕捉远距离的物体图像。这对于探测远处的小型潜在危险物体至关紧要。此外,传感器可在 -40°C 至 +105°C 的宽环境温度范围内保持稳定,确保在各种地理和光照条件中提供可靠表现。”
Leaf Jiang (NODAR): 将 NODAR 的专利自动校准算法应用于安森美的清晰图像,能够精确地逐行对齐多张图像,使我们的专有立体匹配器可以快速识别出图像之间的共同元素,并以比传统技术更高的精度执行视差计算。这又可以为更多像素产生置信度更高的深度测量,并将在更广泛的运行设计域 (ODD) 中显著提高自动驾驶汽车的整体性能和安全性。
展望未来,我们的重点不仅仅是改进现有技术,更将积极探索支持自主运行能力的方式,以适应未来的多元化市场和应用。
Sergey Velichko(安森美): “我们的持续创新为汽车成像行业树立了标杆。我们正在开发更先进的成像方案,以应对低光和恶劣天气条件下的挑战。在不久的将来,我们预计将推出更高分辨率的传感器和更多集成功能,推动自动驾驶迈向新的高度,同时确保不仅在技术上处于领先地位,更在经济层面具有超强性价比。”
Leaf Jiang (NODAR): “除了传统的汽车应用之外,我们还将立体视觉技术应用于工业安全和农业等领域。我们的 GuardView 系统利用这项技术在不同环境中实施 3D 安全监测,提供高分辨率成像和远距离覆盖,从而确保这些领域的安全性和提高运营效率。”
更多资源:
扫码了解
扫码查看
本文作者:

Leaf Jiang 博士是工程行业的知名高管,同时也是 3D 视觉系统领域的权威专家。Leaf 主攻光电子学,拥有麻省理工学院的电气工程学士学位、硕士学位和博士学位,曾在麻省理工学院林肯实验室工作了 12 年,期间负责总统办公室的激光雷达研发工作,并为军方打造了相干和直接探测激光雷达。2017 年,自动驾驶汽车行业迅猛发展,Leaf 敏锐地洞察到激光雷达技术能提供与市场需求之间的巨大差距。为了缩小这差距,Leaf 创立了 NODAR。

Sergey Velichko 自 2007 年起负责安森美汽车传感部门的技术和产品开发。他是 IEEE 高级会员,此前曾在 KPI、美光科技和惠普担任过教学和研发岗位。他负责撰写或参与编写了 50 多篇出版书刊,已颁布或正在审批的专利多达 70 余项。他关注智能传感器技术、战略产品开发、以及新颖成像架构与图像传感器设计创新。
⭐点个 星标 ,茫茫人海也能一眼看到我⭐









 京公网安备 11010802033920号
京公网安备 11010802033920号