


对MCU虚拟化实现难点的思考
最新更新时间:2024-03-22
阅读数:
目录
1.OEM面临的难点
2.Hypervisor的难点思考
2.1 VMs部署到物理内核上的实现方式
2.2 VM调度机制
2.3 虚拟化中的中断处理
2.4 虚拟ECU的通信
3.小结
1.OEM面临的难点
为什么汽车ECU在逐渐倡导虚拟化,主要原因是整车电子电气架构从分布式往集中式演进,OEM希望将以前多个ECU的功能聚合到一个ECU中;
并且近几年国际大厂推出的MCU性能越来越强大,从硬件层面有了实现虚拟化的基础。不过光有硬件还不行,软件也得跟上;因此,除了在功能层面上面的软件实现,现又新增了对虚拟化的软件实现需求。
在此之前,OEM在整合多个供应商软件时候,都是以单个大功能(如BMS)独享整个MCU资源为前提;
现在突然要将这些软件功能放到一个ECU,共享MCU的资源,同时还要保证功能的隔离和资源不会冲突,想想头都大了。
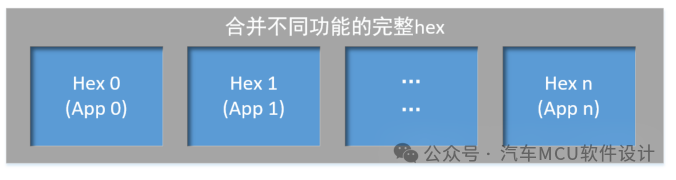
我们以最粗暴的方式来形容这个过程,以前做集成的时候,会把Bootloader和App两个hex文件合成一个完整hex,然后刷进ECU里,
现在就是要把这些不同功能的hex文件合并成一个大的hex文件,刷进高性能的MCU里,如下图:
 假设MCU里面只有三个核,但是有5个不同类别的应用需要集成;为实现功能隔离、资源共享,借鉴座舱系统SOC的Hypervisor思想,如果能在MCU应用一二,也就可以实现上述要求,如下图:
假设MCU里面只有三个核,但是有5个不同类别的应用需要集成;为实现功能隔离、资源共享,借鉴座舱系统SOC的Hypervisor思想,如果能在MCU应用一二,也就可以实现上述要求,如下图:
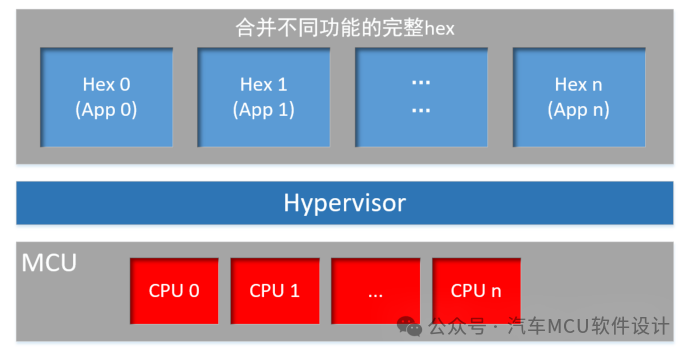
因此个人认为,Hypervisor软件是实现电子电气架构演进的关键路径。
据调研,目前市面上对于CP AUTOSAR下的虚拟化解决方案有Vector的veHypervisor、ETAS的RTA-HVR、EB的Embedded Hypervisor,不过应该都还达不到量产阶段。
2.Hypervisor的难点思考
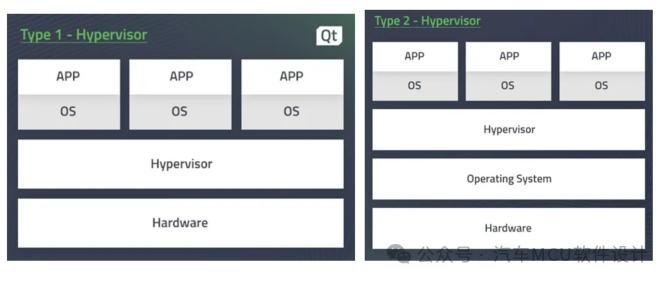
据目前的资料整理,当前基于MCU的Hypervisor均属于Type-1,即Hypervisor直接运行在MCU裸板上。Type-1和Type2区别如下:
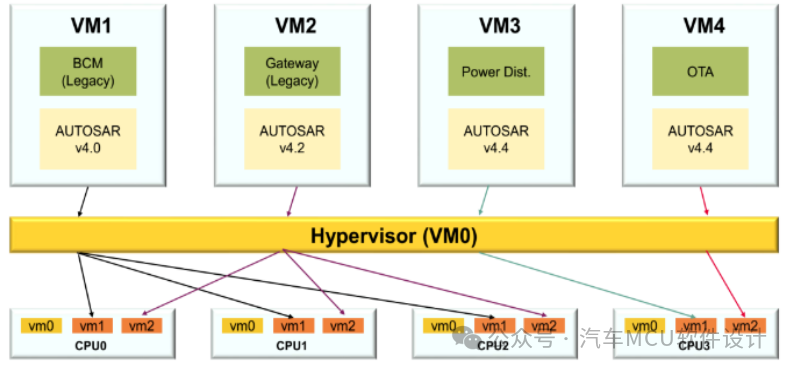
在Type-1 hypervisor下可以布局的方案如下图:
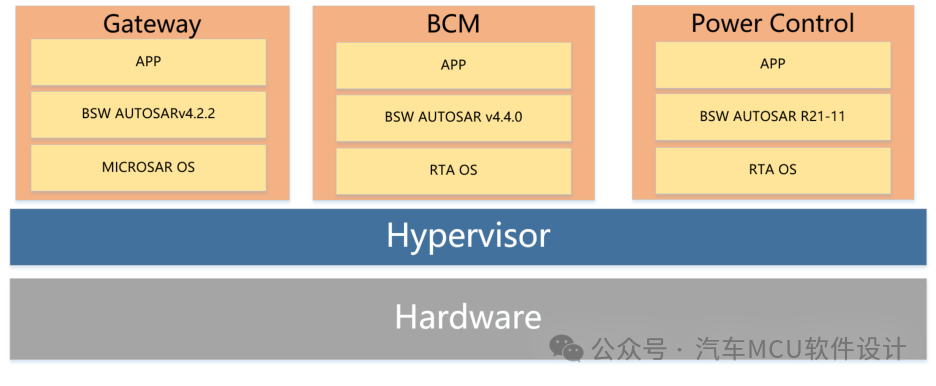
一般来说,Hypervisor是需要运行在最高异常等级下,例如R52内核MCU就需要hypervisor在EL2等级运行,英飞凌TC1.8更直接,直接就提供了名为hypervisor的运行模式。

那么这就引出了第一个问题:VMs部署到物理内核上的实现方式?
2.1 VMs部署到物理内核上的实现方式
我们还是以上图为例,假设Power Control这个虚拟ECU(下文称VM)在最初设计时就需要两个内核来处理通信任务和高实时性任务,这就会和BCM VM或者Gateway VM至少共享一个物理内核,因此在布局上就可以如下图所示:
那么部署成功后,每个VM占用物理内核的调度应该是怎么样的呢?
2.2 VM调度机制
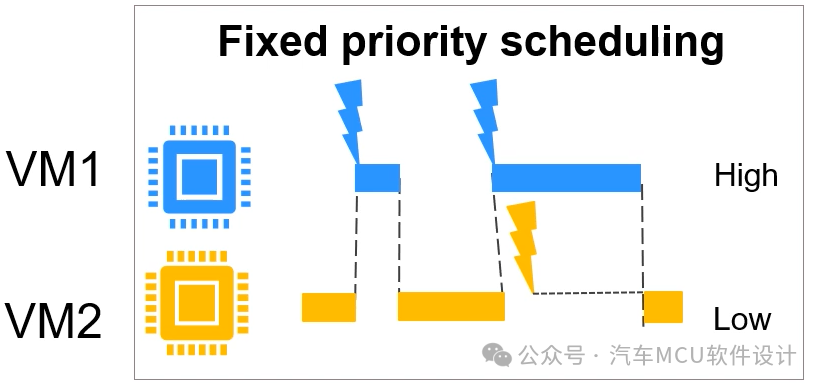
根据英飞凌官网介绍,目前主要有两类的调度机制:固定优先级和时间切片;如下图:
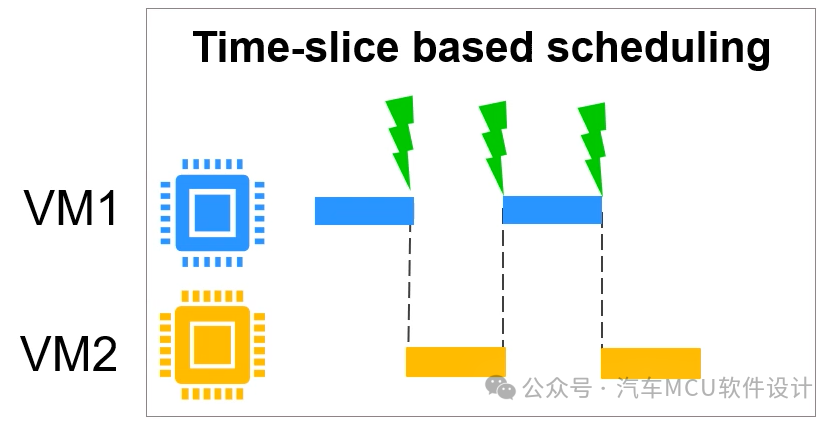
从实现角度来说,使用固定的时间片看起来比较容易实现。
假设有4个VM,占用一个物理内核的时间片分别为100us、200us、300us和400us;这样刚好就能简单组成一个完整的调度周期为1ms。
调度没有问题了,那如果这期间产生了中断,又该如何处理?
2.3 虚拟化中的中断处理
由于中断产生其实是要对应实际功能的,因此在芯片设计时就应考虑虚拟化下的中断是可以分配到某VM,这样我们就可以识别当前产生的中断是哪一个VM需要。
此外,还要考虑在其他VM运行期间的中断处理,举个例子,假设VM2正在运行,此时来了一个属于VM1的中断,这时候要不要处理?
一般来讲,中断产生后应由hypervisor分发到不同VM,所以这个在设计hypervisor软件是需要考虑中断的抢占性。如下

上图中,VM1的ISR就可以抢占VM3的内核占用时间,但不能抢占VM2的内核占用时间。
2.4 虚拟ECU的通信
在之前分布式架构,ECU之间的通信多为CAN\CANFD,是有实际的物理线束的。
现在好了,这些ECU整合到一个MCU里,他们之间的通信该如何是好?
我们最容易想到的就是采用共享内存和Mailbox的方式,毕竟核间通信就是如此设计,但是虚拟化的特征就是VM始终认为自己独占MCU资源,因此对于共享内存的划分就很随意;如何保证共享内存不冲突,且读写权限,这是Hypervisor需要考虑的事情。
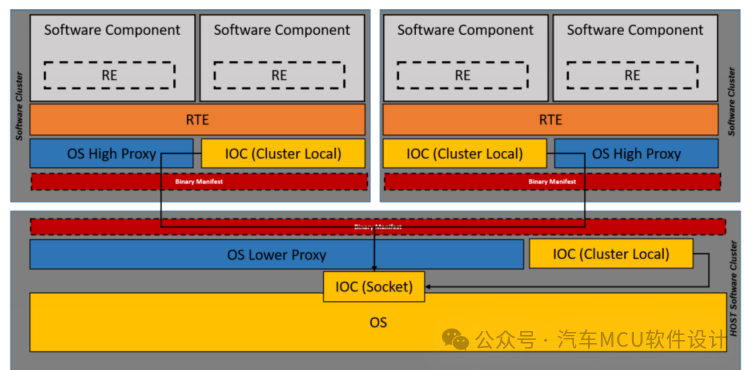
此外,同一个VM里的不同内核通信,又该如何处理呢?
个人认为可以尝试沿用AUTOSAR里的IOC机制,但限于多核经验有限,这里就不献丑了。
3.小结
上面是个人对hypervisor这一层级的软件思考,鉴于之前没有QNX Hypervisor的经验,暂时能想到的就是这些。
接下来还是得好好捋一遍QNX hypervisor,看看有什么可以继续吸收的。
其实,上面只是从应用功能上进行了梳理,但是还有更重要的两个方向没有考虑到,那就是Safety和Security。
举个例子,在分布式架构下,每个ECU拆分下来的ASIL等级是不相同的,如下图:
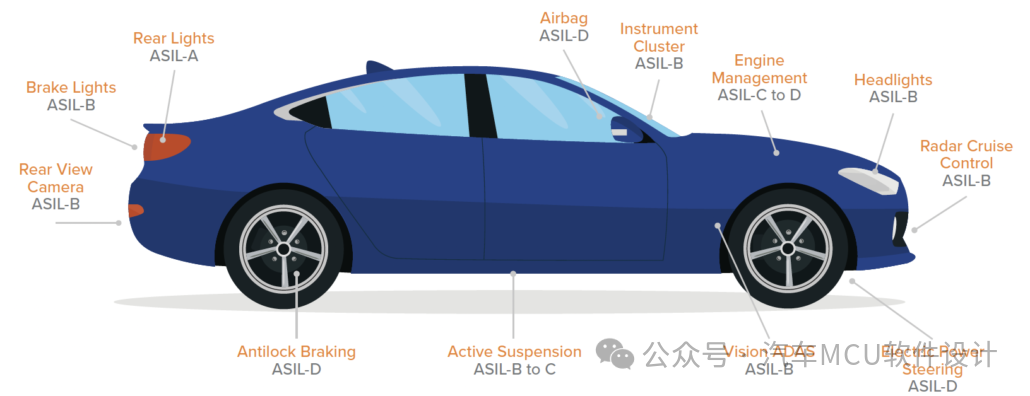
那么如果把不同ASIL等级的ECU集成到一个ECU里,这个功能安全该如何分析? 在设计Hypervisor软件时,是否也需要对软件进行功能安全认证?如果要做认证,那就只能以SEooC的方式进行软件设计,而这样的软件会用到量产上吗?
除此之外,针对Security的设计应该如何考虑。
据了解,目前量产的MCU基本都是内置HSM,但是只有一个密码加速引擎,这在多VM下势必会产生竞争。如何保证各VM都能够使用到HSM,一个方法是增加HSM加速引擎实例,另一个方式可以在HSM侧增加多个Host的配置,先保存来自VM的请求,根据固定优先级算法进行处理,这就必须考虑HSM引擎的数据处理能力了。
以前还在想汽车MCU的虚拟化应该还很远,殊不知就在自己磨磨蹭蹭的时候需求都已经提过来了。
同志们,得再加把劲儿啊。






 京公网安备 11010802033920号
京公网安备 11010802033920号