设计要求:#
利用直流电机充当风扇
键盘可以调整风扇的转速
设计概述:#
按照设计要求,风扇的开与关需要用到独立键盘,转速控制需要用到PWM技术。所需要的单片机芯片为STC89C52,所用的硬件工具是由华清远见开发的基于STC89C52的智能小车。该小车配备所需要的独立按键模块和直流电机模块,独立按键模块由P3口控制,直流电机模块由P1口控制。STC89C52是一种低功耗,高性能的8位微控制器,是加强版的80C51单片机,但是与80C51单片机一样不具备PWM硬件模块,所以我们需要自己写一个程序来软件模拟PWM方波。
PWM是一种方波,可以实现数字信号控制模拟电路,它有两个重要参数周期或频率,占空比。占空比 = 高电平时间/周期,最小为0%,最大为100%,通过调整占空比来控制高电平,低电平所占比例,进而控制直流电机的转速。
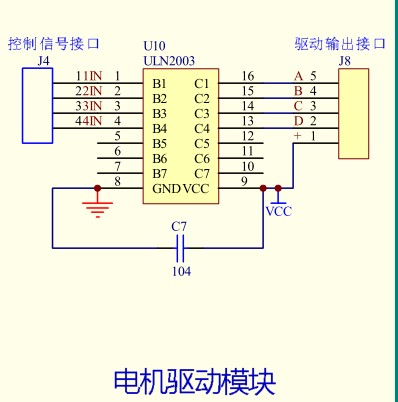
直流电机驱动:该电机使能端P1.4口为高电平有效,使用直流电机前必须将电机使能端置1;电机的正向转动和反向转动由P1.2口和P1.3口的电平状态共同决定,电机正转P1.2口置1,P1.3口置0,电机反转P1.2口置0,P1.3口置1。
独立键盘驱动:独立键盘有s2,s3,s4,s5四个按键,分别由P3.0口,P3.1口,P3.2口,P3.3口控制,将按键按下后P3口导通为低电平。当给P3.0口1置0时表示按键按下,置1时表示按键松开,其他三个按键也是如此。
风扇档速:风扇的档速这里设两档。
源代码:#
#include sbit key_s2 = P3^0;//风扇一档转速按钮 sbit key_s3 = P3^1;//风扇二挡转速按钮 sbit key_s4 = P3^2;//关闭风扇按钮 sbit EN1 = P1^4;//为1 电机使能 sbit IN1 = P1^2;//为1 电机正转 sbit IN2 = P1^3;//为1 电机反转 /*风扇一档转速*/ void fan_motor1() { //定义一个变量pwm,通过对pwm的累加来调控PWM的占空比 unsigned int pwm; while(1) { for(pwm = 0;pwm <= 1000;pwm++) { if(pwm == 700) { EN1 = 1; IN1 = 1; IN2 = 0; } else if(pwm == 1000) { EN1 = 0; } } //按下其中一个键后跳出循环,然后执行与其对应的代码部分 if(key_s3 == 0 || key_s4 == 0) break; } } /*风扇二挡转速函数*/ void fan_motor2() { EN1 = 1; IN1 = 1; IN2 = 0; } /*关闭风扇函数*/ void fan_motor_stop() { EN1 = 0; } /*延时函数*/ void delays(unsigned int ms) { //如果不加volatile,则编译器会自动忽略无循环体的for循环 volatile unsigned int i,j; for(i=ms;i>0;i--) { for(j=110;j>0;j--) ; } } /*定时器中断服务函数*/ void timer0 () interrupt 1 { if(key_s2 == 0)//检测按键是否按下 { delays(10);//延时去抖动 if(key_s2 == 0)//确认按键已经按下 { fan_motor1();//开一档 } } else if(key_s3 == 0) { delays(10); if(key_s3 == 0) { fan_motor2();//开二挡 } while(!key_s3);//等待按键释放 } else if(key_s4 == 0) { delays(10); if(key_s4 == 0) { fan_motor_stop();//关闭风扇 } while(!key_s4); } } void main() { TMOD |= 1<<1; //通过移位运算符'<<'来改变位的状态 TMOD &= ~(1<<0); //置定时器/计数器的工作方式为方式2 TMOD &= ~(1<<2); //选择定时工作方式 TMOD &= ~(1<<3); //门控位:由运行控制位TR启动定时器 TL0 = 156; TH0 = 156; //100us进入一次中断,0.1毫秒 ET0 = 1; //定时器0开中断 EA = 1; //CPU开中断 TR0 = 1; //启动 while(1) //防止程序跑飞 ; }小车部分模块原理图:#

上一篇:基于STC51单片机的计数器
下一篇:C51_单片机开发_XBYTE的使用
推荐阅读最新更新时间:2024-11-06 22:46

 自动识别的垃圾清扫车
自动识别的垃圾清扫车 单片机C语言编程与Proteus仿真技术 (徐爱钧)
单片机C语言编程与Proteus仿真技术 (徐爱钧) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- 【5V输入】升压充电,可对两节串联锂电池(8.4V)电路充电
- LT6656AIDC-3、3V 电压基准作为微功率稳压器的典型应用
- 使用 Analog Devices 的 LT1467L 的参考设计
- numKeyBoard
- LTM4614,采用 15mm-15mm 封装的完整双路和三路输出负载点模块稳压器
- LT3799-1 演示板,具有 PFC 的离线隔离式反激式 LED 驱动器
- 基于ST1PS01EJR 400 mA毫微静态电流小型同步降压转换器的评估板
- 可实现高效驱动的单层冰箱风扇参考设计
- 【ART-Pi】多轮全向移动平台控制板
- 用于电池充电指示器的 NCP300LSN09T1 0.9V 电压检测器的典型应用






 VM721D1
VM721D1





 京公网安备 11010802033920号
京公网安备 11010802033920号