拿到LPC55S16的板卡好几天了,本来目标是测试CANFD和USB转换通信的,发现板卡上接的外设还挺多,话说可以玩一段时间了。在测试CANFD通信之前,先测试一下Classical CAN。,关于这两者的不同,网上说的比较详细。主要的就是通信速率,数据比特率提高到了8Mbps和最大数据帧提高到了64个字节。当前只在应用层面来考虑。官方的SDK提供了MCAN例程,考虑到NXP的IDE还在熟悉当中,还是移植到keil里调试比较方便,如图1所示。

这次测试的目的就是完成Classical CAN每隔2s完成8字节发送,中断接收。
连接图如图2所示:
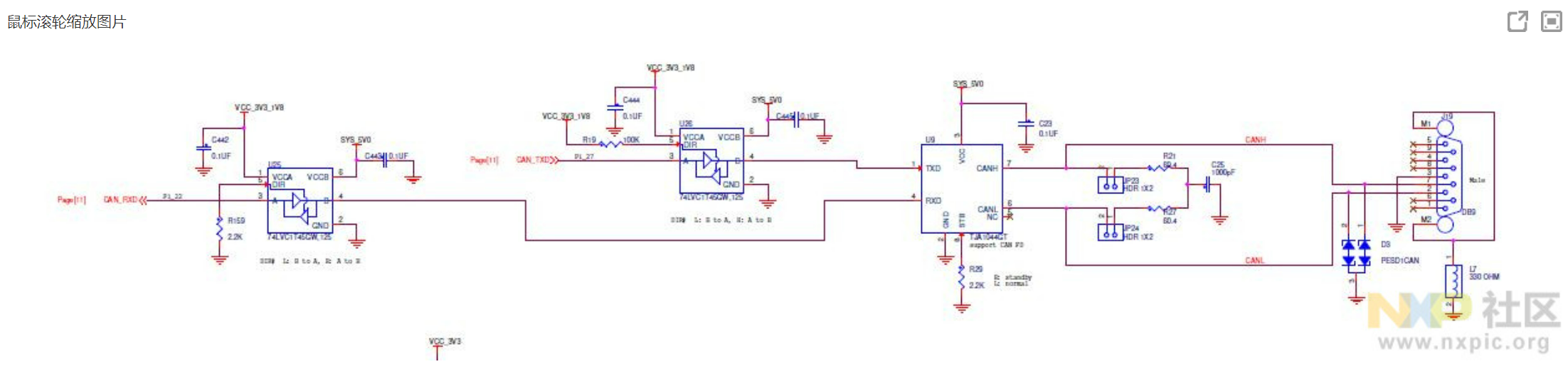
官方原理图如如3所示:
将demo移植到keil后,就是读程序,然后为目的修改程序测试。
2S延时使用的是SYSTick,如下:
/* Set systick reload value to generate 1ms interrupt */
if (SysTick_Config(SystemCoreClock / 1000U))
{
while (1)
{
}
}
SysTick_DelayTicks(2000U);
按照以往的定义,初始化时钟,引脚,CAN定义,主要是字节数,ID和波特率。
整个过程的思路是先测试CAN的发送,如果没问题,再测试CAN的接收,最后整合一下。
波特率的使用:
if (MCAN_CalculateImprovedTimingValues(mcanConfig.baudRateA, MCAN_CLK_FREQ, &timing_config))
{
/* Update the improved timing configuration*/
memcpy(&(mcanConfig.timingConfig), &timing_config, sizeof(mcan_timing_config_t));
}
可以追到波特率的定义上,demo使用的baudRateA 500Kbps,当然也可以选1Mbps.
发送配置:
/* TX buffer config. */
memset(&txBuffer, 0, sizeof(txBuffer));
txBuffer.address = TX_BUFFER_OFS;
txBuffer.dedicatedSize = 1U;
txBuffer.fqSize = 0;
txBuffer.datafieldSize = kMCAN_8ByteDatafield;
MCAN_SetTxBufferConfig(EXAMPLE_MCAN, &txBuffer);
模式选择:
/* Finish software initialization and enter normal mode, synchronizes to
CAN bus, ready for communication */
MCAN_EnterNormalMode(EXAMPLE_MCAN);
接收配置:
/* STD filter config. */
rxFilter.address = STD_FILTER_OFS;
rxFilter.idFormat = kMCAN_FrameIDStandard;
rxFilter.listSize = 1U;
rxFilter.nmFrame = kMCAN_reject0;
rxFilter.remFrame = kMCAN_rejectFrame;
MCAN_SetFilterConfig(EXAMPLE_MCAN, &rxFilter);
stdFilter.sfec = kMCAN_storeinFifo0;
/* Classic filter mode, only filter matching ID. */
stdFilter.sft = kMCAN_classic;
stdFilter.sfid1 = rxIdentifier;
stdFilter.sfid2 = 0x7FFU;
MCAN_SetSTDFilterElement(EXAMPLE_MCAN, &rxFilter, &stdFilter, 0);
/* RX fifo0 config. */
rxFifo0.address = RX_FIFO0_OFS;
rxFifo0.elementSize = 1U;
rxFifo0.watermark = 0;
rxFifo0.opmode = kMCAN_FifoBlocking;
rxFifo0.datafieldSize = kMCAN_8ByteDatafield;
发送帧格式并完成发送:
txIdentifier = 0x123U;
txFrame.xtd = kMCAN_FrameIDStandard;
txFrame.rtr = kMCAN_FrameTypeData;
txFrame.fdf = 0;
txFrame.brs = 0;
txFrame.dlc = 8U;
txFrame.id = txIdentifier << STDID_OFFSET;
txFrame.data = tx_datac;
txFrame.size = CAN_DATASIZE;
txXfer.frame = &txFrame;
txXfer.bufferIdx = 0;
MCAN_TransferSendNonBlocking(EXAMPLE_MCAN, &mcanHandle, &txXfer);
接收帧格式并完成数据接收:
rxIdentifier = 0x321U;
在测试的时候demo上有这么一段:
while (!rxComplete)
{
}
rxComplete = false;
就是用了一个while语句,接收完才会继续发送,屏蔽到就不影响按时发送了。
发送和接收数据如图4和图5所示:


在《How to Use CAN-FD to Transfer Data on LPC5500 Series 》文档中也有对Timing config的解释,在深入学习中还需要继续理解。测试完CAN,就是继续CANFD。
顺便吐个槽,官方文档很多明面上没有,需要找,这会多花费一些时间。
上一篇:LPC553X MCU 体系结构概述
下一篇:ok6410的madplay配置
推荐阅读最新更新时间:2024-11-08 10:29

 纯电动汽车动力电池及管理系统设计 (董艳艳,王万君主编)
纯电动汽车动力电池及管理系统设计 (董艳艳,王万君主编) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- 具有 12VDC 和 24VAC 辅助输入的 LT4275BHDD 25W PD 解决方案的典型应用电路
- FA-128_CC254x,用于 CC254x 低功耗蓝牙无线应用的外部振荡电路
- ESP8266
- A000093,基于 ATmega32U4 8 位 ATmega AVR MCU 的 Arduino 微开发套件平台,无接头
- AM1S-0315SZ 1W DC-DC转换器典型应用
- DER-442 - 30W 隔离反激式、1 - 10 V 模拟调光 LED 驱动器
- 使用 ROHM Semiconductor 的 BU4813 的参考设计
- FRDM-17531EP-EVB,基于 MPC17531A 双 H 桥的 Freedom 扩展板,步进电机驱动器,2-8.6V,0.7A
- 使用 ROHM Semiconductor 的 BD46445 的参考设计
- 使用 Analog Devices 的 LTC1450CN 的参考设计






 STM32L4P5QGI6
STM32L4P5QGI6





 京公网安备 11010802033920号
京公网安备 11010802033920号