首先介绍需要的一些头文件的位置
linux-2.6.32.内核重要文件目录:
linux-2.6.32.2/arch/arm/mach-s3c2410/include/mach/regs-gpio.h
linux-2.6.32.2/arch/arm/plat-s3c24xx/gpio.c
linux-2.6.32.2/linux/asm-generic/io.h
linux-2.6.32.2/include/linux/wait.h
asm -- linux-2.6.32.2/linux/asm-generic
mach -- linux-2.6.32.2/arch/arm/mach-s3c2410/include/mach
plat -- linux-2.6.32.2/arch/arm/plat-s3c24xx/include/plat
-- linux-2.6.32.2/arch/arm/plat/include/plat
1、2440蜂鸣器内核驱动
展示内核驱动
#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include static int beep_major = 0; module_param(beep_major, int, 0);//传参函数,并在模块目录下会生成parameter目录及参数文件 /* MODULE_AUTHOR ( 声明谁编写了模块 ), MODULE_DESCRIPION( 一个人可读的关于模块做什么的声明 ), MODULE_VERSION ( 一个代码修订版本号; 看 MODULE_ALIAS ( 模块为人所知的另一个名字 ), 以及 MODULE_DEVICE_TABLE ( 来告知用户空间, 模块支持那些设备 ). MODULE_LICENSE(“GPL”); 内核认识的特定许可有, “GPL”( 适用 GNU 通用公共许可的任何版本 ), “GPL v2”( 只适用 GPL 版本 2 ), “GPL and additional rights”, “Dual BSD/GPL”, “Dual MPL/GPL”, 和 “Proprietary”. 除非你的模块明确标识是在内核认识的一个自由许可下, 否则就假定它是私有的 */ MODULE_AUTHOR('All'); MODULE_LICENSE('Dual BSD/GPL'); #define BEEP_MAGIC 'b' #define BEEP_START_CMD _IO (BEEP_MAGIC, 1)//使用内核函数库提供的_IO函数,最后参考文献详细查看 #define BEEP_STOP_CMD _IO (BEEP_MAGIC, 2) /* * Open the device; in fact, there's nothing to do here. */ int beep_open (struct inode *inode, struct file *filp) { return 0; } ssize_t beep_read(struct file *file, char __user *buff, size_t count, loff_t *offp) { return 0; } ssize_t beep_write(struct file *file, const char __user *buff, size_t count, loff_t *offp) { return 0; } //一般像read、write一般这些函数不会写什么内容,open有时候会放入初始化函数 /* 使用s3c2410_gpio_cfgpin函数初始化端口,设置为输出,s3c2410_gpio_setpin设置端口输出高低电压,对着开发手册进行设置自己所需要的输出电压。s3c2410_gpio_pullup控制上拉电阻。 */ void beep_stop( void ) { //set GPB0 as output s3c2410_gpio_cfgpin(S3C2410_GPB(0), S3C2410_GPIO_OUTPUT); s3c2410_gpio_setpin(S3C2410_GPB(0),0); } void beep_start( void ) { //set GPB0 as output s3c2410_gpio_pullup(S3C2410_GPB(0),1); s3c2410_gpio_cfgpin(S3C2410_GPB(0), S3C2410_GPIO_OUTPUT); s3c2410_gpio_setpin(S3C2410_GPB(0),1); } /*函数调用,使用ioctl可以通过不同的cmd数,选择所调用的内核函数*/ static int beep_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg) { //add your src HERE!!! switch ( cmd ) { case BEEP_START_CMD: { beep_start(); break; } case BEEP_STOP_CMD: { beep_stop(); break; } default: { break; } } return 0; } static int beep_release(struct inode *node, struct file *file) { return 0; } /* * Set up the cdev structure for a device. */ static void beep_setup_cdev(struct cdev *dev, int minor, struct file_operations *fops) { int err, devno = MKDEV(beep_major, minor); cdev_init(dev, fops); //注册设备,或者应该说是初始化 dev->owner = THIS_MODULE; dev->ops = fops; err = cdev_add (dev, devno, 1); //向内核添加设备失败,linux-2.6之后使用者两个函数进行注册和添加 if (err) printk (KERN_NOTICE 'Error %d adding beep%d', err, minor); } /* file_operations结构体 Linux使用file_operations结构访问驱动程序的函数,这个结构的每一个成员的名字都对应着一个函数调用。 用户进程利用在对设备文件进行诸如read/write操作的时候,系统调用通过设备文件的主设备号找到相应的设备驱动程序,然后读取这个数据结构相应的函数指针,接着把控制权交给该函数,这是Linux的设备驱动程序工作的基本原理。 struct module *owner 第一个 file_operations 成员根本不是一个操作,它是一个指向拥有这个结构的模块的指针。这个成员用来在它的操作还在被使用时阻止模块被卸载. 几乎所有时间中, 它被简单初始化为 THIS_MODULE, 一个在 https://blog.csdn.net/zqixiao_09/article/details/50850475 */ static struct file_operations beep_remap_ops = { .owner = THIS_MODULE, .open = beep_open, .release = beep_release, .read = beep_read, .write = beep_write, .ioctl = beep_ioctl, }; /* * There's no need for us to maintain any * special housekeeping info, so we just deal with raw cdevs. */ static struct cdev BeepDevs; /* * Module housekeeping. */ /*beep_init函数主要用于获取设备号,用于内核识别*/ static int beep_init(void) { int result; dev_t dev = MKDEV(beep_major, 0); //格式转换,beep_major是主设备号,这里是靠调用驱动时的传参,默认为0 char dev_name[]='beep'; /* Figure out our device number. */ if (beep_major) result = register_chrdev_region(dev, 1, dev_name); //手动分配注册设备号,如果之前没有分配设备号,beep_major为0因此调用动态分配设备号进行注册,但是内核分配后beep_major不为0,就会调用该函数,也就是说知道主设备号才来使用该函数 else { result = alloc_chrdev_region(&dev, 0, 1, dev_name); beep_major = MAJOR(dev); //动态分配注册设备号,并更新主设备号,详细查看https://blog.csdn.net/welbell_uplooking/article/details/83654312 } if (result < 0) { printk(KERN_WARNING 'beep: unable to get major %dn', beep_major); return result; } if (beep_major == 0) beep_major = result; /* Now set up cdev. */ beep_setup_cdev(&BeepDevs, 0, &beep_remap_ops); printk('beep device installed, with major %dn', beep_major); printk('The device name is: %sn', dev_name); return 0; } static void beep_cleanup(void) { cdev_del(&BeepDevs); //注销设备,删除一个cdev unregister_chrdev_region(MKDEV(beep_major, 0), 1); //释放注销的所占用的设备号 printk('beep device uninstalledn'); } module_init(beep_init); module_exit(beep_cleanup); //驱动加载系统传参 EXPORT_SYMBOL(beep_major); 加载驱动模块 insmod beep_dev.ko 创建dev下面beep设备文件与我们的beep_dev驱动绑定 mknod /dev/beep c 251 0 原命令形式:mknod /dev/node_name c major minor 只有创建了beep文件用户才能通过open之类的操作访问或者调用内核驱动函数 2、2440蜂鸣器用户函数 其次是蜂鸣器内核外的应用层函数 #include #include #include #include #include #define BEEP_MAGIC 'b' #define BEEP_START_CMD _IO (BEEP_MAGIC, 1) #define BEEP_STOP_CMD _IO (BEEP_MAGIC, 2) int main() { int i = 0; int dev_fd; dev_fd = open('/dev/beep',O_RDWR | O_NONBLOCK); if ( dev_fd == -1 ) { printf('Cann't open file /dev/beepn'); exit(1); } printf('Start beepn'); ioctl (dev_fd, BEEP_START_CMD,0); getchar(); ioctl (dev_fd, BEEP_STOP_CMD,0); printf('Stop beep and Close devicen'); close(dev_fd); return 0; } 关系大概如下: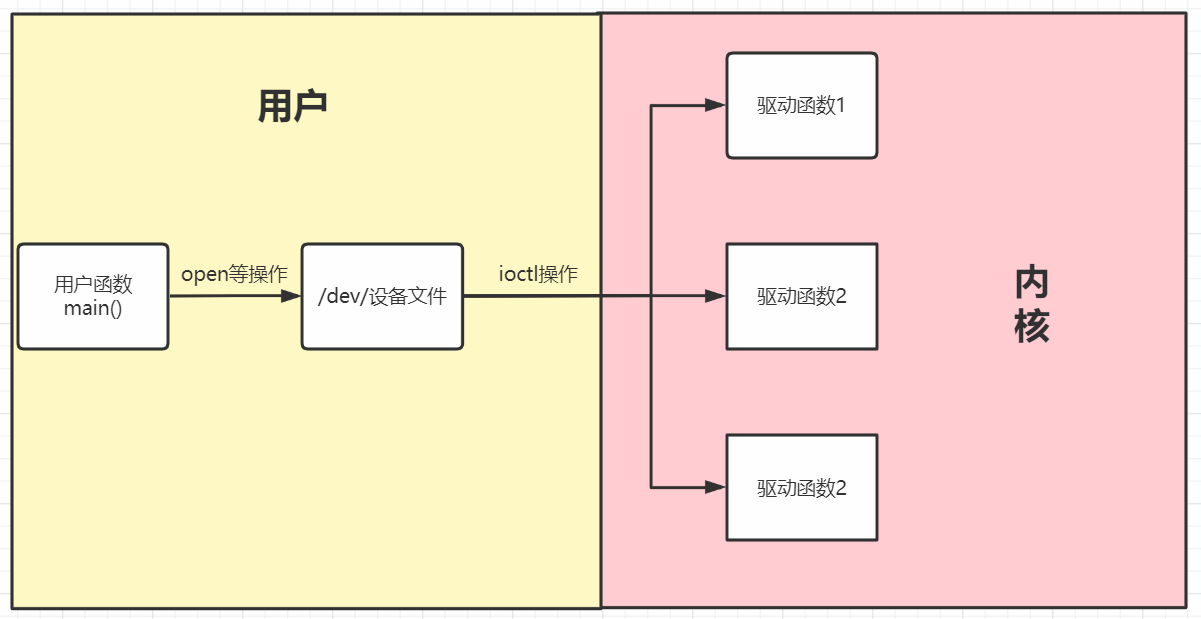
上一篇:TQ2440--nandflash(K9F2G08U0A)驱动编写
下一篇:S3C2440 SPI驱动框架
推荐阅读最新更新时间:2024-11-17 03:00

 实时响应的嵌入式系统虚拟化微内核架构_吴良顺
实时响应的嵌入式系统虚拟化微内核架构_吴良顺 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- AD8648ARZ 24MHz 轨到轨运算放大器的典型应用电路
- A000068,不带 PoE 的 Arduino 以太网 Rev3 - 基于 ATmega328 8 位 ATmega AVR MCU 的开发套件
- C2898290_0.91寸OLED显示屏方案验证板-14P
- LTC3855EUJ 演示板,双路输出,VIN = 4.5V 至 25V,VOUT1 = 3.3V @ 5A,VOUT2 = 2.5V @ 5A
- 设计坚固、容错的运动控制反馈系统
- LT8608IMSE 5V、2MHz 降压型稳压器的典型应用电路
- NCP45521 Eco SWITCH 高级负载管理的典型应用负载开关电路
- LT6210 单路可编程电源电流反馈放大器的典型应用
- 具有精密使能和电源良好输出的 ADP5134 三路 1800mA 降压稳压器的典型应用电路
- AD8616ARZ-REEL 二阶低通滤波器运算放大器的典型应用电路






 TAJB106K020KNJ
TAJB106K020KNJ





 京公网安备 11010802033920号
京公网安备 11010802033920号