



一,串口相关寄存器
USART_SR 状态寄存器
USART_DR 数据寄存器
USART_BRR 波特率寄存器
USART_CR1 控制寄存器
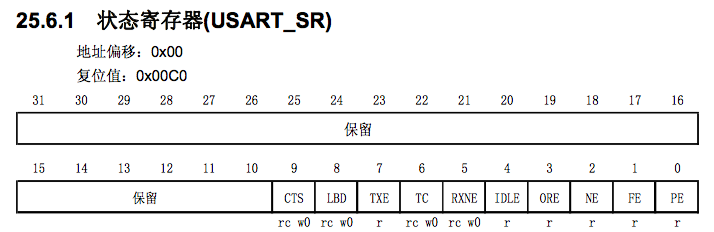
USART_SR-状态寄存器:
状态寄存器USART_SR,描述串口寄存器的一些状态:
如位5:读数据寄存器非空

通过读取这个位的值,判断是否收到了完整的数据
串口已经接收到了数据,并且已经写入到了USART_DR寄存器
USART_DR-数据寄存器:
数据寄存器USART_DR,只使用了位0-8,其他位保留
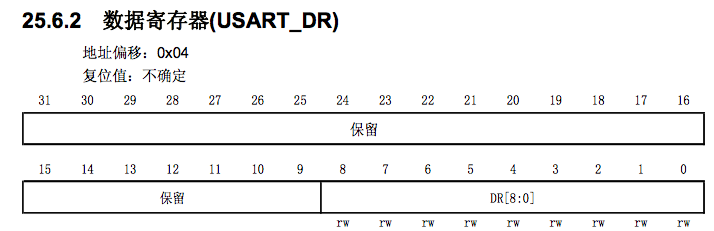
读寄存器:读取该寄存器获取接收到的数据值
写寄存器:向该寄存器写入发送的数据对数据进行发送
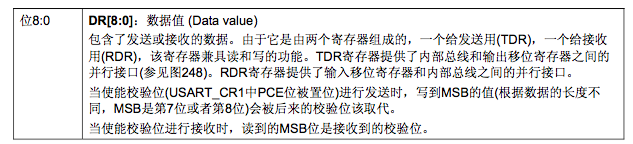
USART_BRR-波特率寄存器:
波特率寄存器USART_BRR,只用到了低16位,高16位保留

0-3位[3:0] : USART分频器的小数部分DIV_Fraction
4-15位[15:4] : USART分频器的整数部分DIV_Mantissa
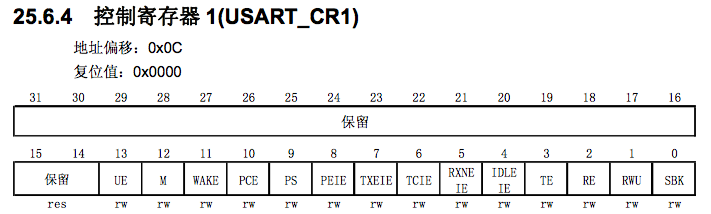
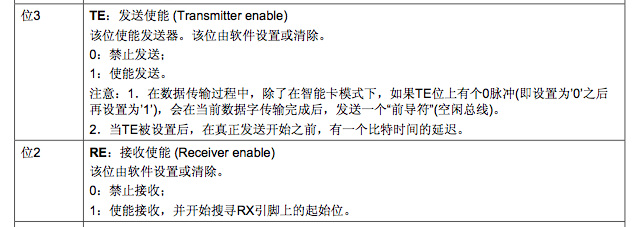
USART_CR1-控制寄存器:
USART_BRR波特率寄存器,设置串口寄存器使能位
如:接收使能,发送使能
二,波特率的计算方法
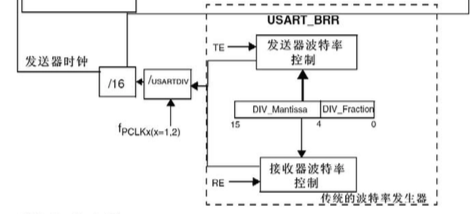
如图:
波特率由波特率发生器和PCLKx共同产生
PCLKx的值由串口本身决定
通过配置USART_BRR寄存器确定波特率发生器的值
经过USARTDIV分频器除以16得到最终的波特率
波特率计算方法:
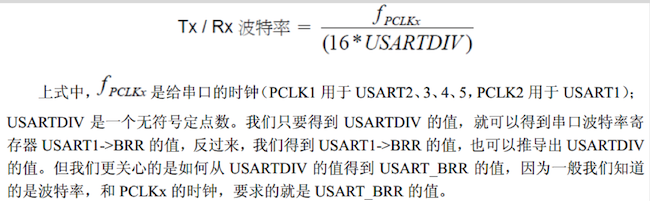
设置串口1波特率为115200MHz
串口1的时钟来自PCLK2=72MHz
由公式得到:
USARTDIV=72000000/(115200*16)=39.0625
整数部分DIV_Mantissa=39=0x27
小数部分DIV_Fraction=16*0,0625=1=0x01
所以设置USART->BRR=0x0271,就可以实现设置串口1的波特率为115200MHz
三,串口操作相关库函数
获取状态标志位函数-操作USART_SR寄存器
// 获取状态标志位
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
// 清除状态标志位
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
// 获取中断状态标志位
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
// 清除中断状态标志位
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
接收发送数据函数-操作USART_DR寄存器
// 发送数据到串口(通过写USART_DR寄存器发送数据)
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
// 接收数据(从USART_DR寄存器读取接收到的数据)
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
串口配置函数
// 串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
// 使能串口
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
// 使能相关中断
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
四,串口硬件连接
PA9-RXD
PA10-TXD
CH340 USB转串口 将USB虚拟为串口使用
五,串口配置的步骤
1,串口时钟使能,GPIO时钟使能
RCC_APB2PeriphClockCmd()
2,串口复位
USART_DeInit();
3,GPIO端口模式设置
GPIO_Init();
4,串口参数初始化
USART_Init()
5,开启中断并初始化NVIC
NVIC_Init();
USART_ITConfig();
6,使能串口
USART_Cmd();
7,中断函数逻辑
USARTx_IRQHandler();
8,串口数据发送
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
9,串口传输状态获取
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
六,串口测试程序设计
程序功能:
电脑通过USB线连接开发板,开发板通过USB转串口实现和电脑的通信
电脑使用串口工具想单片机发送数据,单片机收到数据后返回给电脑
注:以串口1为例实现
七,串口测试程序实现分析
1,使能GPIO时钟
串口1的发送,接收引脚为PA9和PA10
所以我们要使能GPIOA和串口1的时钟
串口1和GPIOx时钟源为APB2
所以使用RCC_APB2PeriphClockCmd函数进行初始化
stm32f10x_rcc.c找到RCC_APB2PeriphClockCmd函数源码:
/**
* @brief Enables or disables the High Speed APB (APB2) peripheral clock.
* @param RCC_APB2Periph: specifies the APB2 peripheral to gates its clock.
* This parameter can be any combination of the following values:
* @arg RCC_APB2Periph_AFIO, RCC_APB2Periph_GPIOA, RCC_APB2Periph_GPIOB,
* RCC_APB2Periph_GPIOC, RCC_APB2Periph_GPIOD, RCC_APB2Periph_GPIOE,
* RCC_APB2Periph_GPIOF, RCC_APB2Periph_GPIOG, RCC_APB2Periph_ADC1,
* RCC_APB2Periph_ADC2, RCC_APB2Periph_TIM1, RCC_APB2Periph_SPI1,
* RCC_APB2Periph_TIM8, RCC_APB2Periph_USART1, RCC_APB2Periph_ADC3,
* RCC_APB2Periph_TIM15, RCC_APB2Periph_TIM16, RCC_APB2Periph_TIM17,
* RCC_APB2Periph_TIM9, RCC_APB2Periph_TIM10, RCC_APB2Periph_TIM11
* @param NewState: new state of the specified peripheral clock.
* This parameter can be: ENABLE or DISABLE.
* @retval None
*/
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
RCC->APB2ENR |= RCC_APB2Periph;
}
else
{
RCC->APB2ENR &= ~RCC_APB2Periph;
}
}
stm32f10x_rcc.h找到IS_RCC_APB2_PERIPH函数声明:
/** @defgroup APB2_peripheral
* @{
*/
#define RCC_APB2Periph_AFIO ((uint32_t)0x00000001)
#define RCC_APB2Periph_GPIOA ((uint32_t)0x00000004)
#define RCC_APB2Periph_GPIOB ((uint32_t)0x00000008)
#define RCC_APB2Periph_GPIOC ((uint32_t)0x00000010)
#define RCC_APB2Periph_GPIOD ((uint32_t)0x00000020)
#define RCC_APB2Periph_GPIOE ((uint32_t)0x00000040)
#define RCC_APB2Periph_GPIOF ((uint32_t)0x00000080)
#define RCC_APB2Periph_GPIOG ((uint32_t)0x00000100)
#define RCC_APB2Periph_ADC1 ((uint32_t)0x00000200)
#define RCC_APB2Periph_ADC2 ((uint32_t)0x00000400)
#define RCC_APB2Periph_TIM1 ((uint32_t)0x00000800)
#define RCC_APB2Periph_SPI1 ((uint32_t)0x00001000)
#define RCC_APB2Periph_TIM8 ((uint32_t)0x00002000)
#define RCC_APB2Periph_USART1 ((uint32_t)0x00004000)
#define RCC_APB2Periph_ADC3 ((uint32_t)0x00008000)
#define RCC_APB2Periph_TIM15 ((uint32_t)0x00010000)
#define RCC_APB2Periph_TIM16 ((uint32_t)0x00020000)
#define RCC_APB2Periph_TIM17 ((uint32_t)0x00040000)
#define RCC_APB2Periph_TIM9 ((uint32_t)0x00080000)
#define RCC_APB2Periph_TIM10 ((uint32_t)0x00100000)
#define RCC_APB2Periph_TIM11 ((uint32_t)0x00200000)
#define IS_RCC_APB2_PERIPH(PERIPH) ((((PERIPH) & 0xFFC00002) == 0x00) && ((PERIPH) != 0x00))
从参数定义验证了GPIOA-GPIOG 和串口1(USART1)的时钟使能由RCC_APB2PeriphClockCmd()控制
所以使能GPIOA和串口1时钟代码为:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟源
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //使能串口1时钟源
2,初始化GPIOA的工作模式
通过查找STM32中文参考手册确定串口1引脚工作模式配置:
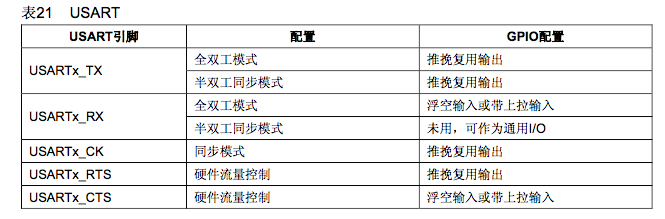
如图:
串口1接收发送引脚配置
发送端PA9配置为推挽复用输出
接收端PA10配置为浮空输入或上拉输入
代码:
GPIO_InitTypeDef GPIO_InitStrue;
//发送端PA9配置
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_9; //发送端-TXD
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP; //推挽输出
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStrue);
//接收端PA10配置
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10; //接收端-RXD
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStrue);
3,串口初始化
stm32f10x_usart.h头文件找到USART_Init函数声明:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
stm32f10x_usart.h找到入参USART_InitTypeDef结构体声明
/**
* @brief USART Init Structure definition
*/
typedef struct
{
uint32_t USART_BaudRate; // 设置波特率
uint16_t USART_WordLength; // 字长8或9(停止位)
uint16_t USART_StopBits; // 停止位
uint16_t USART_Parity; // 奇偶校验
uint16_t USART_Mode; // 发送接收使能
uint16_t USART_HardwareFlowControl; // 硬件流控制
} USART_InitTypeDef;
USART_HardwareFlowControl-硬件流参数有效性验证
/** @defgroup USART_Hardware_Flow_Control
* @{
*/
#define USART_HardwareFlowControl_None ((uint16_t)0x0000)
#define USART_HardwareFlowControl_RTS ((uint16_t)0x0100)
#define USART_HardwareFlowControl_CTS ((uint16_t)0x0200)
#define USART_HardwareFlowControl_RTS_CTS ((uint16_t)0x0300)
#define IS_USART_HARDWARE_FLOW_CONTROL(CONTROL)\
(((CONTROL) == USART_HardwareFlowControl_None) || \
((CONTROL) == USART_HardwareFlowControl_RTS) || \
((CONTROL) == USART_HardwareFlowControl_CTS) || \
((CONTROL) == USART_HardwareFlowControl_RTS_CTS))
USART_Mode-使能参数有效性验证
/** @defgroup USART_Mode
* @{
*/
#define USART_Mode_Rx ((uint16_t)0x0004) #define USART_Mode_Tx ((uint16_t)0x0008) #define IS_USART_MODE(MODE) ((((MODE) & (uint16_t)0xFFF3) == 0x00) && ((MODE) != (uint16_t)0x00))
USART_Parity-奇偶校验参数有效性
/** @defgroup USART_Parity
* @{
*/
#define USART_Parity_No ((uint16_t)0x0000) #define USART_Parity_Even ((uint16_t)0x0400) #define USART_Parity_Odd ((uint16_t)0x0600) #define IS_USART_PARITY(PARITY) (((PARITY) == USART_Parity_No) || \ ((PARITY) == USART_Parity_Even) || \ ((PARITY) == USART_Parity_Odd))
USART_StopBits-停止位参数有效性
/** @defgroup USART_Stop_Bits
* @{
*/
#define USART_StopBits_1 ((uint16_t)0x0000)
#define USART_StopBits_0_5 ((uint16_t)0x1000)
#define USART_StopBits_2 ((uint16_t)0x2000)
#define USART_StopBits_1_5 ((uint16_t)0x3000)
#define IS_USART_STOPBITS(STOPBITS) (((STOPBITS) == USART_StopBits_1) || \
((STOPBITS) == USART_StopBits_0_5) || \
((STOPBITS) == USART_StopBits_2) || \
((STOPBITS) == USART_StopBits_1_5))
USART_WordLength-字长参数有效性
/** @defgroup USART_Word_Length
* @{
*/
#define USART_WordLength_8b ((uint16_t)0x0000) #define USART_WordLength_9b ((uint16_t)0x1000) #define IS_USART_WORD_LENGTH(LENGTH) (((LENGTH) == USART_WordLength_8b) || \ ((LENGTH) == USART_WordLength_9b))
串口初始化代码:
USART_InitTypeDef USART_InitStrue;
USART_InitStrue.USART_BaudRate=115200; //设置波特率-115200MHz
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//硬件流控制-不使用
USART_InitStrue.USART_Mode=USART_Mode_Rx| USART_Mode_Tx; //使能设置-发送接收都使能
USART_InitStrue.USART_Parity=USART_Parity_No; //奇偶校验-不使用奇偶校验
USART_InitStrue.USART_StopBits=USART_StopBits_1; //停止位-一个停止位
USART_InitStrue.USART_WordLength=USART_WordLength_8b //字长-8位字长
USART_Init(USART1, &USART_InitStrue);
4,使能串口1:
stm32f10x_usart.h头文件找到USART_Cmd函数定义
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
USART_Cmd(USART1, ENABLE);
5,由于使用了中断首先要配置中断优先级分组-在主函数
misc.h头文件中找到NVIC_PriorityGroupConfig函数声明:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
1
1
misc.c中找到NVIC_PriorityGroupConfig函数实现:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
{
/* Check the parameters */
assert_param(IS_NVIC_PRIORITY_GROUP(NVIC_PriorityGroup));
/* Set the PRIGROUP[10:8] bits according to NVIC_PriorityGroup value */
SCB->AIRCR = AIRCR_VECTKEY_MASK | NVIC_PriorityGroup;
}
查看参数IS_NVIC_PRIORITY_GROUP有效性校验-misc.h
#define NVIC_PriorityGroup_0 ((uint32_t)0x700) /*!< 0 bits for pre-emption priority
4 bits for subpriority */
#define NVIC_PriorityGroup_1 ((uint32_t)0x600) /*!< 1 bits for pre-emption priority
3 bits for subpriority */
#define NVIC_PriorityGroup_2 ((uint32_t)0x500) /*!< 2 bits for pre-emption priority
2 bits for subpriority */
#define NVIC_PriorityGroup_3 ((uint32_t)0x400) /*!< 3 bits for pre-emption priority
1 bits for subpriority */
#define NVIC_PriorityGroup_4 ((uint32_t)0x300) /*!< 4 bits for pre-emption priority
0 bits for subpriority */
#define IS_NVIC_PRIORITY_GROUP(GROUP) (((GROUP) == NVIC_PriorityGroup_0) || \
((GROUP) == NVIC_PriorityGroup_1) || \
((GROUP) == NVIC_PriorityGroup_2) || \
((GROUP) == NVIC_PriorityGroup_3) || \
((GROUP) == NVIC_PriorityGroup_4))
中断分组配置代码:
//配置中断分组为2,即2位抢占优先级和2位响应优先级
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2)
6,开启接收中断
stm32f10x_usart.h头文件中找到USART_ITConfig函数声明:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
stm32f10x_usart.c中找到USART_ITConfig函数实现:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState)
{
uint32_t usartreg = 0x00, itpos = 0x00, itmask = 0x00;
uint32_t usartxbase = 0x00;
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_CONFIG_IT(USART_IT));
assert_param(IS_FUNCTIONAL_STATE(NewState));
/* The CTS interrupt is not available for UART4 and UART5 */
if (USART_IT == USART_IT_CTS)
{
assert_param(IS_USART_123_PERIPH(USARTx));
}
usartxbase = (uint32_t)USARTx;
/* Get the USART register index */
usartreg = (((uint8_t)USART_IT) >> 0x05);
/* Get the interrupt position */
itpos = USART_IT & IT_Mask;
itmask = (((uint32_t)0x01) << itpos);
if (usartreg == 0x01) /* The IT is in CR1 register */
{
usartxbase += 0x0C;
}
else if (usartreg == 0x02) /* The IT is in CR2 register */
{
usartxbase += 0x10;
}
else /* The IT is in CR3 register */
{
usartxbase += 0x14;
}
if (NewState != DISABLE)
{
*(__IO uint32_t*)usartxbase |= itmask;
}
else
{
*(__IO uint32_t*)usartxbase &= ~itmask;
}
}
第二个参数USART_IT的有效性校验IS_USART_CONFIG_IT:
stm32f10x_usart.h头文件找到IS_USART_CONFIG_IT声明:
#define USART_IT_PE ((uint16_t)0x0028)
#define USART_IT_TXE ((uint16_t)0x0727)
#define USART_IT_TC ((uint16_t)0x0626)
#define USART_IT_RXNE ((uint16_t)0x0525)
#define USART_IT_IDLE ((uint16_t)0x0424)
#define USART_IT_LBD ((uint16_t)0x0846)
#define USART_IT_CTS ((uint16_t)0x096A)
#define USART_IT_ERR ((uint16_t)0x0060)
#define USART_IT_ORE ((uint16_t)0x0360)
#define USART_IT_NE ((uint16_t)0x0260)
#define USART_IT_FE ((uint16_t)0x0160)
#define IS_USART_CONFIG_IT(IT) (((IT) == USART_IT_PE) || ((IT) == USART_IT_TXE) || \
((IT) == USART_IT_TC) || ((IT) == USART_IT_RXNE) || \
((IT) == USART_IT_IDLE) || ((IT) == USART_IT_LBD) || \
((IT) == USART_IT_CTS) || ((IT) == USART_IT_ERR))
串口1初始化代码:
//打开串口1的接收中断,当串口1接收到数据时会触发此中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
6,中断优先级的设置
初始化NVIC,设置中断的抢占优先级和响应优先级
参考:NVIC
NVIC_InitTypeDef NVIC_InitTypeStrue;
NVIC_InitTypeStrue.NVIC_IRQChannel=USART1_IRQn; // 哪个通道-stm32f10x.h顶层头文件包含参数定义
NVIC_InitTypeStrue.NVIC_IRQChannelCmd=ENABLE; // 是否开启中断通道-使能
NVIC_InitTypeStrue.NVIC_IRQChannelPreemptionPriority=1; // 抢占优先级
NVIC_InitTypeStrue.NVIC_IRQChannelSubPriority=1; // 响应优先级,子优先级
NVIC_Init(&NVIC_InitTypeStrue);
7,编写中断服务函数
格式: USARTx_IRQHandler();
在启动文件startup_stm32f10x_hd.s中找到串口123的中断服务函数
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD USART3_IRQHandler ; USART3
中断服务函数代码
void USART1_IRQHandler(void){
u8 res;
//判断中断类型
//参数1:哪个串口 参数2:中断类型
if(USART_GetITStatus(USART1, USART_IT_RXNE)){//接收数据中断
res = USART_ReceiveData(USART1);//读取串口1接收到的数据
//回发
USART_SendData(USART1, res);
}
}
八,串口程序完整代码
USER文件夹新建main.c函数:
#include "stm32f10x.h"
// 主函数
int main(void)
{
// 设置中断优先级分组位2 - 2位抢占2位相应
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 调用函数 初始化USART1相关引脚配置
My_USART1_Init();
while(1);
}
// 串口初始化函数
void My_USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStrue;
USART_InitTypeDef USART_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
// 1,使能GPIOA,USART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
// 2,设置PGIO工作模式-PA9 PA10复用为串口1
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue);
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue);
// 3,串口1初始化配置
USART_InitStrue.USART_BaudRate=115200;
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStrue.USART_Parity=USART_Parity_No;
USART_InitStrue.USART_StopBits=USART_StopBits_1;
USART_InitStrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_InitStrue);
// 4,打开串口1
USART_Cmd(USART1,ENABLE);
// 5,使能串口1中断-接收数据完成中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
// 6,设置中断优先级-主函数中设置中断优先级分组
NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStrue);
}
// 中断服务函数
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))// 接收到数据
{
res= USART_ReceiveData(USART1); // 获得串口1接收到的数据
USART_SendData(USART1,res); // 通过串口1发送数据
}
}
以上代码实现:
电脑通过串口助手发送数据给单片机
单片机接收数据进入接收数据串口中断
读取DR寄存器中接收到的数据
将接收到的数据再通过串口回写给电脑
(function () {(function () {('pre.prettyprint code').each(function () { var lines = (this).text().split(′\n′).length;var(this).text().split(′\n′).length;varnumbering = $('
').addClass('pre-numbering').hide(); (this).addClass(′has−numbering′).parent().append((this).addClass(′has−numbering′).parent().append(numbering); for (i = 1; i
上一篇:stm32功能严重异常的几个常见原因
下一篇:STM32 MDK常见错误与解决
推荐阅读
史海拾趣
在半导体市场竞争日益激烈的背景下,ASI也面临着巨大的市场压力和挑战。为了应对市场波动和竞争压力,ASI不断调整战略方向,加大在研发和创新方面的投入。公司不断推出新产品、新技术,以满足市场的不断变化和客户需求。同时,ASI也注重提升产品质量和服务水平,赢得了客户的信任和好评。
为了进一步拓展市场份额,达方电子开始在全球范围内布局生产基地和研发中心。同时,公司加强了对供应链的管理,确保原材料的稳定供应和产品质量的持续提升。这一阶段的努力,使达方电子在全球电子行业中的地位得到了进一步提升。
1957年,麻省理工学院的工程师肯尼斯·奥尔森(Kenneth Olsen)和哈伯特·安德森(Harlan Anderson)共同创立了Digital Equipment Corporation(DEC)。他们最初的目标是开发和生产创新的数字计算设备。凭借他们在数字技术领域的专业知识和独特视角,DEC推出了首批数字实验室和数字系统组件,这些产品在市场上取得了初步的成功,为DEC的发展奠定了坚实的基础。
为了进一步扩大市场份额,高频电子积极实施全球化战略。公司在全球范围内建立了销售网络和服务体系,与众多国际知名企业建立了长期合作关系。同时,高频电子还针对不同地区的市场需求,定制化开发符合当地标准的产品和服务。这些努力使得高频电子的产品和服务能够覆盖全球多个国家和地区,为公司带来了稳定的收入来源和持续增长的动力。
HVPSI成立于本世纪初,起初是一家小型的技术初创企业,专注于研发高效、可靠的高压电源模块。在创始人及核心团队的带领下,公司迅速在MOV(金属氧化物压敏电阻)模块领域取得了突破。这些模块在电力电子设备中起到了关键的过压保护作用,有效提高了系统的稳定性和安全性。通过不断的技术迭代和产品优化,HVPSI逐渐在行业内树立了技术领先的形象。
|
编的一个驱动,用的是2.6.22内核,交叉编译器是arm-linux-gcc 3.4.1。 下面是我的makefile文件: KERNELDIR :=/home/arm/linux-2.6.22.19 PWD :=$(shell pwd) CFLAGS =-D__KERNEL__ -DMODULE -I$(KERNELDIR)/include/ CROSS_COMPILE =/home/ar ...… 查看全部问答∨ |
这几天做相关项目的测试,有个问题不解: 在vxworks环境下有两个任务A和B,B的优先级高 B接收消息并通过驱动函数转发出去,消息队列中最大消息个数为500个,添加了流量控制,每转发3包个则延迟1个tick 而测试任务A我设定每向B发送20个消息(一个 ...… 查看全部问答∨ |
|
这是一个TFT显示一幅红色图片的程序,但是在板上运行时,显示完一幅完整的图片要得差不多一个小时,不知道是什么原因, 请各位大侠 挥指知之间 指点指点 ..................不胜感激. #include<LPC214X.h>//#include\ ...… 查看全部问答∨ |
以前在论坛上下一个LM3S的课件(应该是四川师范的课件) 感觉写的很好 但是现在电脑丢了 资料也没了。。。。。 现在急需 但是在论坛上找不到了。。。。。。。有谁知道在哪啊。。… 查看全部问答∨ |
|
原文:由于轮椅控制器采用的是双极性模式,有四个功率管:T1、T2、T3、T4,其中 T1 和 T4 的 PWM 脉冲信号是相同的,T2 和 T3 的 PWM 脉冲是相同的,T1 与 T2 的 PWM 脉冲是互补的。而从 DSP 出来的只有一对互补的信号,因此利用 CD74ACT157 再复制 ...… 查看全部问答∨ |
|
|
本帖最后由 dontium 于 2015-1-23 12:42 编辑 这也是TI的,文章中说了几种有源器件:晶体管、JFET、MOSFET、运放、比较器等的特性 … 查看全部问答∨ |
给大家转发一篇TI 工程师关于LED驱动的升压模块转换器的使用电路,,很值得一看,,, 作者:John Caldwell,德州仪器 (TI) 模拟应用工程师 Gregory Amidon,德州仪器 (TI) 模拟应用工程师 引言 驱动高亮度 LED 的一种方法是对标准升压转换器拓 ...… 查看全部问答∨ |






设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- 【已结束】TE 直播|如何有效应对当下测试测量领域的挑战
- 免费测评乐鑫ESP32-C3-DevKitM-1
- 100%获奖,EE新年福利!
- 答题赢好礼:利用GAN技术应对电源适配器设计挑战
- 【摸黑抢楼】赢大礼,关于示波器的狂想曲!正式开抢!!!
- 是德科技——从容应对医疗电子设备设计和测试的挑战! 答题有好礼
- 新年测评活动!ST NUCLEO-H743ZI“佩奇”待测,快来申请年后第一波测评!
- 下载MPS汽车电机控制技术干货,赢【Keep体脂秤、自动洗手机套装、小米保温杯】,开启汽车技术进阶之旅!
- 兆易GD32307E-START免费测评试用
- 有奖看视频|2022台北国际电脑展——美光主题演讲精选






 京公网安备 11010802033920号
京公网安备 11010802033920号