



这里用到PCF8591 AD DA芯片 和51单片机机,和一个电位器。通过 控制 电位器,产生PWM波,控制舵机 旋转。并在数码管上显示角度。
电路图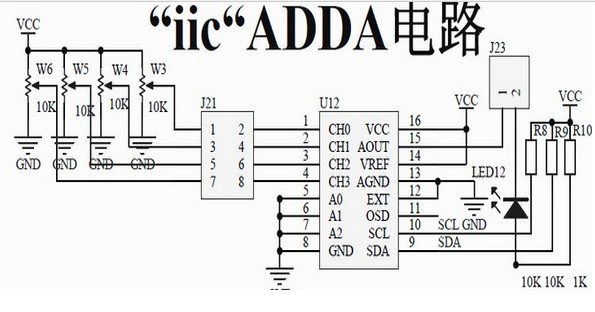


这是程序:
/*-----------------------------------------------
名称:IIC协议 PCF8591ADDA转换
内容:此程序通过IIC协议对DAAD芯片操作,读取电位器的电压,并输出模拟量,用LED亮度渐变指示,晶体选用12MHz
------------------------------------------------*/
#include"reg52.h"
#include //包含NOP空指令函数_nop_();
#define AddWr 0x90 //写数据地址
#define AddRd 0x91 //读数据地址
sbit Sda=P1^2; //定义总线连接端口
sbit Scl=P1^1;
sbit control_signal=P1^5;
data unsigned int Display[8];//定义临时存放数码管数值
unsigned char code Datatab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//7段数共阴码管段码表
unsigned int ADtemp; //定义全局变量
unsigned int high,low;
static unsigned int count1;
/*------------------------------------------------
延时程序
------------------------------------------------*/
void mDelay(unsigned char j)
{
unsigned int i;
for(;j>0;j--)
{
for(i=0;i<125;i++)
{;}
}
}
/*------------------------------------------------
初始化定时器0
------------------------------------------------*/
void Init_Timer0(void)
{
TMOD "=0x01; //定时器设置 0.1ms in 11.0592M crystal
TH0=(65536-78)/256;
TL0=(65536-78)%256; //定时0.1mS
ET0=1;//定时器中断打开
EA=1;//总中断
TR0=1; //启动定时器0
}
/*------------------------------------------------
启动IIC总线
------------------------------------------------*/
void Start(void)
{
Sda=1;
_nop_();
Scl=1;
_nop_();
Sda=0;
_nop_();
Scl=0;
}
/*------------------------------------------------
停止IIC总线
------------------------------------------------*/
void Stop(void)
{
Sda=0;
_nop_();
Scl=1;
_nop_();
Sda=1;
_nop_();
Scl=0;
}
/*------------------------------------------------
应答IIC总线
------------------------------------------------*/
void Ack(void)
{
Sda=0;
_nop_();
Scl=1;
_nop_();
Scl=0;
_nop_();
}
/*------------------------------------------------
非应答IIC总线
------------------------------------------------*/
void NoAck(void)
{
Sda=1;
_nop_();
Scl=1;
_nop_();
Scl=0;
_nop_();
}
/*------------------------------------------------
发送一个字节
------------------------------------------------*/
void Send(unsigned char Data)
{
unsigned char BitCounter=8;
unsigned char temp;
do
{
temp=Data;
Scl=0;
_nop_();
if((temp&0x80)==0x80)
Sda=1;
else
Sda=0;
Scl=1;
temp=Data<<1;
Data=temp;
BitCounter--;
}
while(BitCounter);
Scl=0;
}
/*------------------------------------------------
读入一个字节并返回
------------------------------------------------*/
unsigned char Read(void)
{
unsigned char temp=0;
unsigned char temp1=0;
unsigned char BitCounter=8;
Sda=1;
do
{
Scl=0;
_nop_();
Scl=1;
_nop_();
if(Sda)
temp=temp|0x01;
else
temp=temp&0xfe;
if(BitCounter-1)
{
temp1=temp<<1;
temp=temp1;
}
BitCounter--;
}
while(BitCounter);
return(temp);
}
/*------------------------------------------------
读取AD模数转换的值,有返回值
------------------------------------------------*/
unsigned int ReadADC(unsigned char Chl)
{
unsigned int Data;
Start(); //启始信号
Send(AddWr);//0x90
Ack();
Send(0x40|Chl);//写入选择的通道,本程序只用单端输入,差分部分需要自行添加
//Chl的值分别为0、1、2、3,分别代表1-4通道
Ack();
Start();
Send(AddRd); //读入地址
Ack();
Data=Read(); //读数据
Scl=0;
NoAck();
Stop();
return Data; //返回值
}
/******************************************************************/
/* 主程序 */
/******************************************************************/
void main()
{
Init_Timer0();
while(1)
{
unsigned int angle;
ADtemp=ReadADC(0); //ADtemp的取值范围是0-255,定时的时间范围是0.5-2.5ms
high=65075-7.2*ADtemp; // ( high=65035-7.8*ADtemp;12MHz)(65535-(460+7.2*ADtemp 11.0592MHz)
low=47563+7.2*ADtemp; // ( low=46035+7.8*ADtemp; ) ( 65535-(17972-7.2*ADtemp 11.0592MHz )
angle=ADtemp*0.7;
Display[0]=Datatab[angle/100];//处理0通道电压显示
Display[1]=Datatab[(angle%100)/10];
Display[2]=Datatab[angle%10];
while(1)
{
P0=Display[count1];//用于动态扫描数码管
P2=count1;
mDelay(1);
count1++;
if(count1==3) //表示扫描3个数码管
{
count1=0;
break;
}
}
}
}
/******************************************************************/
/* 定时器中断函数
/******************************************************************/
void tim(void) interrupt 1 using 1
{
static unsigned char count;
if (!count)
{
control_signal = 1; //给高电平
TH0=high/256;
TL0=high%256; }
else
{
control_signal=0 ;
TH0=low/256;
TL0=low%256;
}
count=~count;
}
上一篇:单片机+ADC0832+MQ2温度烟雾报警控制
下一篇:出租车计费仿真原理图+单片机源程序
推荐阅读
史海拾趣
在全球化的大背景下,D3 Semiconductor积极拓展国际市场。除了与贸泽电子的合作外,公司还与多家国际知名的电子企业建立了合作关系,将产品推向全球各地。同时,D3 Semiconductor还加强了在国际市场的营销和品牌建设,提高了公司的知名度和美誉度。这一系列的努力使D3 Semiconductor在国际市场上取得了显著的成绩,也为公司的未来发展奠定了坚实的基础。
并购完成后,GainSpan的技术与Telit的物联网平台实现了深度融合。Telit利用GainSpan的低功耗WiFi模组技术,推出了更加高效、节能的物联网解决方案。这些方案不仅降低了物联网设备的能耗,还延长了设备的使用寿命,提高了整体系统的稳定性和可靠性。同时,GainSpan的技术也为Telit的物联网平台带来了更多创新应用的可能性。
随着新能源汽车市场的快速发展,汽车电子领域对电感产品的需求不断增长。长江微电敏锐地捕捉到这一市场机遇,加大了对汽车电子领域的投入力度。公司推出的车规级系列电感产品广泛应用于汽车LED驱动电路、汽车多媒体系统、车联网系统等领域。凭借优异的产品性能和稳定可靠的质量保障,长江微电在汽车电子领域树立了良好的口碑和品牌形象。
为了满足全球客户的需求,Eska公司实施了市场拓展和国际化战略。公司在欧洲各大主要城市及美国设立了服务中心,以便为当地客户提供快速可靠的服务。此外,Eska还利用先进的分切设备,为当地客户集中快速地提供载切大小格式灰板的服务。同时,Eska的产品也通过全球代理商、经销商及存货商网络,覆盖到更广泛的市场。
随着全球对环保问题的日益关注,ECLIPTEK公司积极响应环保号召,将绿色环保理念融入其产品研发和生产过程中。公司采用环保材料和清洁能源,减少生产过程中的废弃物和污染物排放。同时,ECLIPTEK还积极参与环保公益活动,推动电子行业的可持续发展。
随着市场的不断变化和竞争的加剧,BEL并未满足于现状,而是积极寻求多元化发展。公司不仅拓展了原有的军事电子领域,还涉足电信、运算、公共运输和广播等多个行业。同时,BEL还积极拓展全球市场,将产品出口到多个国家和地区,实现了从区域性企业向全球性企业的跨越。
|
3G时代,能否替代原有的固定宽带 2009年元月,中国3张3G牌照发放 电信 cdma2000 推出天翼品牌,声称测试速度已经达到3.3Mbps,年底升级到9Mbps。 联通 WCDMA 声称速度达到7.2Mbps,号称最成熟的3G制式。 ...… 查看全部问答∨ |
|
|
本帖最后由 paulhyde 于 2014-9-15 09:42 编辑 今年的元器件清单公布时间是29号? 不会提前公布出来么 早点公布也好早点猜题啊? … 查看全部问答∨ |
|
|
日前,笔者在松下中心东京(Panasonic Center Tokyo)亲身体验了干电池的制作。说是亲身体验,其实是参加了松下主办的干电池制作实践班,在旁边观看了孩子们制作电池的过程。虽为手工制作,但据说使用的部件与工厂实际使用的相同。此次制作的是锰干 ...… 查看全部问答∨ |
|
|
本系统侧重点在微信号的采集,通过设计一个微信号采集和分析的系统,通过特定的集成电路对微小信号放大,转变为标准电流信号并能够传输到远端。通过模数转换器将其转换为数字量。利用相应软件对采集到的数字进行修正,使之能够比较准 ...… 查看全部问答∨ |
|
|
1)我自己写了一个GPIO驱动,和一个应用,烧到板后,用应用打开驱动时,打开失败,不知道为什么,请教大家怎么样能调试驱动,那些打印信息DEBUGMSG()在串口怎么让他显示呢? 2)在自己定制的NK.B0烧到板上,启动的时候,DN ...… 查看全部问答∨ |






设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








 SFH 5701 A01
SFH 5701 A01





 京公网安备 11010802033920号
京公网安备 11010802033920号