

一、编码器原理
如果两个信号相位差为90度,则这两个信号称为正交。由于两个信号相差90度,因此可以根据两个信号哪个先哪个后来判断方向、根据每个信号脉冲数量的多少及整个编码轮的周长就可以算出当前行走的距离、如果再加上定时器的话还可以计算出速度。
二、为什么要用编码器

从上图可以看出,由于TI1,TI2一前一后有个90度的相位差,所以当出现这个相位差时就表示轮子旋转了一个角度。但有人会问了:既然都是脉冲,为什么不用普通IO中断?实际上如果是轮子一直正常旋转当然没有问题。仔细观察上图,如果出现了毛刺呢?这就是需要我们在软件中编写算法进行改正。于是,我们就会想到如果有个硬件能够处理这种情况那不是挺好吗?
对应的硬件的编码器就来了~
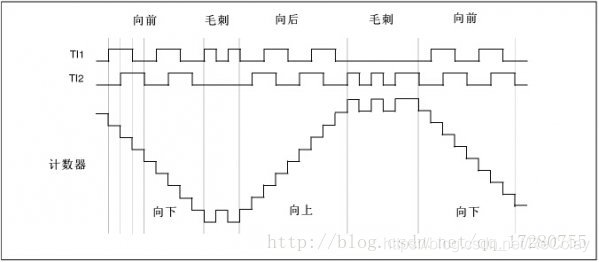
我们看到STM32的硬件编码器还是很智能的,当TI1,TI2脉冲是连续产生的时候计数器加一次或减一次,而当某个接口产生了毛刺或抖动,则计数器计数不变,也就是说该接口能够容许抖动。
在STM32中,编码器使用的是定时器接口,查阅STM32F103数据手册可知,定时器1,2,3,4,5和8有编码器的功能,而其他定时器没有。注意,在这几个定时器中也只有CH1和CH2可以设置为编码器模式~
三、STM32编码器配置相关
输入信号TI1,TI2后经过输入滤波,边沿检测产生TI1FP1、TI2FP2,然后接到编码器模块。通过配置编码器的工作模式,就可以对编码器进行正向/反向计数。
比如如果用的是定时器2,则对应的引脚是在PA0和PA1上。
通常为了提高精度我们会选择在上升沿和下降沿都进行计数!

还有一个非常重要的图这里也记录下

其中让人费解的应该是在第二列的相对信号的电平,这里就来详细谈一下吧。
其实也不难理解哈,我们上面也说了通常为了提高精度会在A、B两相的上升沿和下降沿都进行计数,那么对应在一个周期就可以计数四次,计数次数的增加也就意味着精度的提高!
编码器模式下,如果此时处于正转,那么这四次计数应该都是加的。同理,如果是反转,那么这四次计数都是减的。那么问题来了,如何判断正反转呢?
不就是在相对电平的基础上嘛!!!

仔细对照图中,在正转或者反转的情况下,A相对B的电平高低以及上表中列出的计数方向便可了然于心!!!
选择编码器接口模式的方法是:
如果计数器只在TI2的边沿计数,则置TIMx_SMCR寄存器中的 SMS=001;
如果只在TI1边沿计数,则置SMS=010;
如果计数器同时在TI1和TI2边沿计数,则置SMS=011。
通过设置TIMx_CCER寄存器中的CC1P和CC2P位,可以选择TI1和TI2极性;如果需要,还可以 对输入滤波器进行编程。
两个输入TI1和TI2被用来作为增量编码器的接口。假定计数器已经启动(TIMx_CR1 寄存器中的CEN=’1’),计数器由每次在TI1FP1或TI2FP2上的有效跳变驱动。
配置范例:
CC1S=’01’ (TIMx_CCMR1寄存器, IC1FP1映射到TI1)
CC2S=’01’ (TIMx_CCMR2寄存器, IC2FP2映射到TI2)
CC1P=’0’ (TIMx_CCER寄存器, IC1FP1不反相, IC1FP1=TI1)
CC2P=’0’ (TIMx_CCER寄存器, IC2FP2不反相, IC2FP2=TI2)
SMS=’011’ (TIMx_SMCR寄存器,所有的输入均在上升沿和下降沿有效).
CEN=’1’ (TIMx_CR1寄存器,计数器使能)
四、STM32实战代码
对了,必须要再说明的是编码器模式下只能对应一个定时器的CH1/CH2通道,也就是刚好接A、B相! Perfect!!!
/*TIM2初始化为编码器接口*/
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定时器4的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
/*TIM4初始化为编码器接口*/
void Encoder_Init_TIM4(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能定时器4的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM4,0);
TIM_Cmd(TIM4, ENABLE);
}
/*单位时间编码器计数 输入定时器 输出速度值*/
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;
case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0;break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0;break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0X0001)//溢出中断
{
}
TIM4->SR&=~(1<<0);//清除中断标志位
}
void TIM2_IRQHandler(void)
{
if(TIM2->SR&0X0001)//溢出中断
{
}
TIM2->SR&=~(1<<0);//清除中断标志位
}
五、经验之谈
1、编码器有个转速上限,超过这个上限是不能正常工作的,这个是硬件的限制,原则上线数越多转速就越低,这点在选型时要注意,编码器的输出一般是开漏的,所以单片机的io一定要上拉输入状态。【平衡小车之家的编码电机已经有硬件上拉】
2、定时器初始化好以后,任何时候CNT寄存器的值就是编码器的位置信息,正转他会加,反转他会减。这部分是不需要软件干预的,初始化时给的TIM_Period 值是码盘整圈的刻度值,在减溢出会自动修正为这个数,加超过此数值就回0.。
3、如果要扩展成多圈计数需要溢出中断,程序上圈计数加减方向位就行了.。
4、每个定时器的输入脚可以通过软件设定滤波 。
5、应用中如果没有绝对位置信号,或者初始化完成后还没有收到绝对位置信号前的计数只能是相对计数,收到绝对位置信号后重新修改一次CNT的值就行了。码盘一般都有零位置信号,结合到定时器捕获输入就行,上电以后要往返运动一下找到这个位置。
6、即便是滤波计数,值偶尔也会有出错误的情况,一圈多计一个或少计一个数都是很正常的。特别是转速比较高的时候,尤其明显,有个绝对位置信号做修正是很有必要的。绝对位置信号不需要一定在零位置点,收到这个信号就将CNT修正为一个固定的数值即可.。
7、开启定时器的输入中断可以达到每个步计数都作处理的效果,但是高速运转的时候可能会处理不过来。
参考
[1] https://blog.csdn.net/Zach_z/article/details/75095061
[2] https://blog.csdn.net/qq_17280755/article/details/73770598
[3] https://blog.csdn.net/muyidian/article/details/79000721
上一篇:【STM32平衡小车】通过ADC获取电池电压
下一篇:【STM32平衡小车】电磁巡线技术的发展及电磁巡线介绍(一)
推荐阅读
史海拾趣
ESPROS在飞行时间(Time-of-Flight,简称ToF)技术领域取得了显著突破。ToF技术是一种用于测量光在物体上反射所需时间的测距技术,它在3D视觉应用中具有广泛的应用前景。ESPROS凭借其多年的技术积累,成功开发出从单点传感器到QVGA面阵的完整ToF产品线,为客户提供了全方位的3D ToF解决方案。
为了加快技术发展和市场拓展的步伐,Cygnal积极寻求与其他公司的战略合作。通过与半导体制造商、软件开发商等公司的合作,Cygnal获得了更多的技术支持和市场资源。这些合作不仅提升了Cygnal的技术实力和市场竞争力,还为其未来的发展奠定了坚实的基础。
随着技术的不断进步和市场的逐步打开,弘凯光电开始将业务拓展至全球范围。公司的客户群迅速扩大,遍布60多个国家和地区,同时在欧洲、北美、南美、东南亚和中东地区均设立了经销网点。此外,弘凯光电还积极寻求国际认证,以证明其产品的品质和可靠性。通过取得ISO9001质量保证体系、ISO14001国际环境管理体系认证等一系列认证,公司进一步提升了品牌形象和市场竞争力。
重庆平洋电子有限公司,自其1998年3月创立之初,便扎根于重庆这片热土,开始了其在电子行业的探索之旅。当时,电子行业正处于快速发展的阶段,市场竞争激烈。然而,公司凭借对市场的敏锐洞察和对技术的执着追求,成功研发出多款电子元器件,逐渐在市场中站稳脚跟。
ESS一直将技术创新作为公司发展的核心动力。通过不断投入研发资源,ESS在音频芯片、视频技术、传真/调制解调器技术等领域取得了多项重要突破。这些技术创新不仅提升了ESS产品的性能和品质,还为公司在市场中赢得了更多竞争优势。同时,ESS还积极与全球知名企业和研究机构合作,共同推动半导体芯片技术的创新和发展。正是这种持续的技术创新和不懈的追求卓越,使ESS在电子行业中始终保持领先地位。
ESS的创始人陈兆良是一位具有远见卓识的领导者。他不仅带领公司成功转型,专注于个人电脑音频技术,还推动了公司向更广泛的半导体芯片领域发展。陈兆良凭借其在半导体语音芯片领域的深厚造诣,一度夺得了全球80%的市场份额,被誉为“数码音频和视频之父”。他的领导才能和对市场的敏锐洞察力为ESS的成功奠定了坚实基础。
|
找一块参加嵌入式Linux培训班的人(为打9折) 我之前是做单片机开发和蓝牙产品开发的,现在想报嵌入式Linux培训班, 看到尚观科技的“UEA—嵌入式内核驱动开发班”不错,但是太贵,要14700(提前报名优惠500),2人同时报名优惠到9.5折,3人优惠 ...… 查看全部问答∨ |
|
|
有一个USB设备,可不知道端口,怎么读和写数据啊。。 用createfile,writefile,readfile的方法 我自己用createfile打开USB设备,USB路径中没有加端口,打开句柄成功,但用该句柄写和读数据失败, 用getlasterror()显示植为6:invalid_handle ...… 查看全部问答∨ |
今天写了一段boot的代码,初始化工作状态的各个堆栈之后,建立中断向量表时遇到了如下问题: 代码如下: boot.asm …… B _Int_Init; …… Int_Init.c unsigned int vector[16] = {1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16}; void Int_Init( ...… 查看全部问答∨ |
|
请问STM32的FSMC外接16bitNand时,输出的地址或命令是16bit吗? 请问STM32F103VC的FSMC外接16bitNand时,CPU往Address section或Command section写入的地址或命令应该是16bit还是8 ...… 查看全部问答∨ |
the device in limp mode,operation falure 真是郁闷,近来做了几块板子。竟然碰到这个问题,我用的是F28015,以前的产品设计中都没有这个问题 现在做了几块新板子,却有这个问题。原理图都一样的,不知道哪位高手以前也碰到过这个问题… 查看全部问答∨ |
|
北京某公司有医疗电子项目请北京地区飞思卡尔工程师朋友兼职帮忙 北京某公司有医疗电子项目请北京地区飞思卡尔工程师朋友兼职帮忙,要求:1、必须在北京地区工作,外地朋友无需联系,请谅解;2、一般1至2,3个月左右的项目期间,不能出差;3、每周能保证25~30小时用于兼职开发;4、项目需要的技术方向为: &nb ...… 查看全部问答∨ |
【FPGA(cyclone4)第二期 】 时序与仿真学习-流水线型LUT乘法器 流水操作可以说是Verilog HDL语言的特权,顺序操作如C语言是很难实现流水操作。 我们先假设有一个流水操作模块,它有3个操作步骤,在A进入之际,直到A离开这个模块之后,期间有3个空挡的时间,成为潜伏时间,在这段时间内没有任何字母从这个模块 ...… 查看全部问答∨ |






设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








 STM32L4P5VGT6
STM32L4P5VGT6





 京公网安备 11010802033920号
京公网安备 11010802033920号