



对可穿戴型助力机器人控制策略进行分析。 根据研究目的及人体结构和功能的特殊性和复杂性,通过将人体下肢作适当简化及必要的假设,提出基于骨-肌肉功能模型的下肢助力机器人控制方法,该方法通过对骨-肌肉模型中的弹性系数和阻尼系数的调节能为人体下肢运动提供助力支持。 同时,通过人-机间交互力信息实现人体下肢的运动预判。
利用机器增强人类肌肉的力量和感知能力,同时保留人的灵活性和直接操作的感觉是机器人研究领域之一。 人体的所有运动都与力及其控制有关,助力系统利用特定装置给人提供一定的力补偿,降低人自身能量的消耗,或是对那些有异样运动行为的人提供治疗或矫形。
根据助力对象的不同,可穿戴型助力机器人可分为两类:1)直接式:直接给使用者提供动力,如下肢助力、背部助力及上肢助力等,这种情况下,助力装置的运动需超前于人体相应的运动。 2)间接式:分担使用者的劳动负荷,诸如背负的重物、搬运的货物等,从而达到减轻使用者劳动强度的目的,这种模式需要机器与使用者同步运动。
由于助力装置基本是刚性体,整体柔顺性差,这样人与装置运动时会造成不协调与不自然,这便涉及到关节自由度的确定及其驱动问题。 在运动辨识上,国外多数采用肌电信息作为人体运动信息的检测方法,这就要求搞清人体各肌肉块的功能,选择最能反应人体运动状况的肌肉块,但很多动作通常是靠肌肉群来完成,一块肌肉的收紧与松弛并不能完成全部动作,这给电极的安放及信号的提取带来很大的困难,肌电信号是人体的生理反映,它会受到人自身状况及环境因素的影响,如汗液的分泌、衣服厚薄、松紧等。 通过对国内外可穿戴型助力机器人的研究现状进行分析,结合多维力传感器方面的研究成果,提出基于人-机交互力信息的运动信息获取方法及肌肉功能模型的控制方法。
1 人体运动的描述和人体简化模型
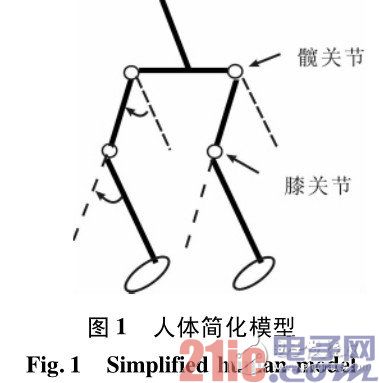
人是人-机-环境系统中的主导因素。 在人体运动位置检测中,高速摄影机实地拍摄是最常用的方法。 由于这种方法是非接触式的记录,因此不影响人的实际运动,最能真实反映人的实际运动情况。 对于该文的研究来说,上述检测系统显得过于庞大,且受到空间的约束,显然不适用。 因此,采用一种即实用又简捷的运动信息检测系统是该文研究中必要环节。从研究方法来说,对对象进行研究离不开对对象进行合理的抽象,当分析各种动作时,姿势分析特别是人体各部分之间的相对位置分析是关键,将特定时刻各个关节点的位置连接起来,就能形成棍状链式结构,将人体下肢简化为一个多杆多关节棍状链式结构,也就是一个具有有限运动自由度的系统,如图 1 所示,以此结构作为计算模型对人体各部的运动和整体运动进行运动学及动力学分析。 表 1 为各关节活动度信息。

2 运动分析
髋关节及膝关节的协调屈伸运动是实现人行走功能的前提,助力机器人的助力腿可以看作为一个串联机构。 它是由一系列连杆通过转动关节串联而成的。 通过自主轨迹规划,助力机构可以完成类似双足机器人的动作,如行走、跨越障碍等动作。表 2 为各杆 D-H 参数和关节变量。

由表 2 中的参数,可求出末端的位姿矩阵:

(1)
当步行助力机器人提供 100%助力时,这意味着助力机器人系统完全成为一个搭载器,对于下肢助力机器人来说,人的下肢就是其负载,人体下肢各段分散于装置各段连杆之上,这点与普通操作臂型机器人不同(负载主要集中在末端)。 图 2 为人体下肢与机器人混合图,图 3 为机器人的机械结构效果图。由图 2 中参数,利用二阶拉格朗日方法得髋关节和膝关节处力矩 T1和 T2的动力学方程式:

(2)
其中: D 系数是与质量、速度、加速度等有关的函数。


3 人体下肢运动预判
步行助力机器人与使用者通过束带紧密结合在一起,形成一个高度自动化的人-机一体化系统。 此系统要实时地获得使用者的运动信息。 用于运动信息采集的典型传感器有:sEMG(表面肌电传感器)、肌肉压力传感器及关节角度传感器等。
研究中,考虑对应于人体三维运动在装置和人体间适当地配置测力点,根据各测力点感受到的人体运动时的多维力导向信息,以及事先设定的参考值,判断下一刻动作是屈或伸,完成由人-机交互信息到使用者运动意图的推理,这样就不同于通过捆绑于人体上的肌电传感器及角度仪用于检测人体运动信息的方法。
4 仿小腿肌肉功能模型的下肢助力机器人控制分析
英国著名生理学家希尔(Hill A V)提出了一个由三个元素组成的肌肉结构力学模型,又称三元素模型,用此反应肌肉的功能。 随着对人体结构逐步深入的认识,不同的模型及分析方法被提出。

人体运动系统是由骨骼和固着在骨上的肌肉组成的,肌肉的收缩和舒张牵动骨骼,使人体能够进行各种运动。 由于人体结构和功能的特殊性和复杂性,将人体下肢作适当简化及必要的假设后,对人体下肢建立其功能模型,图 4 为下肢的小腿部分骨-肌肉功能模型。 这里,骨骼简化为棍状结构体,肌肉简化为由弹簧-阻尼组成的阻抗模型。 其中: k 和 c 分别表示弹性系数和阻尼系数,并忽略了由摩擦力和机械传动阻力引起的未知干扰,模型的运动方程为:

其中: M 为肌肉产生的力矩[N·m],I 为转动惯量 [kg·m2],β 为关节角加速度 [rad/s2],ω 为关节速度 [rad/s],θ 为关节角度 [rad]。
肌力的产生是由肌肉的收缩和舒张所引起的,由力矩定义可知:

其中:

其中: x 表示肌肉在收缩与舒张中的长度变量,由图 4 可知,x 可按下式计算:

人在行走时,主要是通过髋关节及膝关节的屈伸运动来实现其行走功能,双腿的摆动多分布于矢状面内。 助力机器人的助力机器臂可以看作为一个开式运动链,它是由一系列连杆通过转动关节串联而成,开链的一端固定在腰带上,末端安装有特别制作的金属鞋底,髋关节及膝关节屈伸运动由伺服电动机驱动,关节的相对运动导致连杆的运动,使助力腿完成类似人的下肢步行动作。

步行助力机器人与人体下肢通过束带紧密联系在一起,如图 5 所示,步行助力机器人的最终运动是通过位于使用者与装置间的各测力点感受到的人体运动时的多维力信息来完成自主运动,不需要任何操纵台或外部控制设备,形成一个高度自动化的人-机混合系统。 助力机器人要达到助力的功能,首先,对使用者下肢运动预判;其次,助力装置除克服自身动力矩(主要由装置自身重量引起的重力矩)外,还要降低人体肌肉对关节所能产生的力作用,即降低肌力,从而达到助力的目的。 结合装置自身的动力矩,对式(3)进行如下调整:

其中: Mexoskeleton是对外骨骼装置进行动力学分析后的关节动力矩; μ 为修正因子;助力机器人连杆装置的转动惯量计算如下:

近似计算人体各段转动惯量的公式如下:

其中: X1为体重[kg]; X2为身高[cm]; Bi0,Bi1,Bi2为二元回归方程系数。
同时,角加速度可表示如下:

其中: dt 可以近似地认为是实际控制系统中的控制采样周期 T ,即 dt =·T ,整理合并后可得:

式(7)所确立的力与角速度间的对应关系式是建立在人体肌肉功能模型之上,是形成系统伺服规则的重要依据。 5 实验
实验以原型样机为对象,利用人-机间的交互力传感器进行人-机行走实验,除使用者手拿一个紧急停止按钮外,整个过程由计算机独立控制,无任何操纵杆或控制面板。 图 6 是人-机混合系统控制框图,图7 是单腿混合助力系统运动时的输出响应曲线。 图7 中,根据人-机间交互力的方向与外骨骼助力机器人关节旋转方向的关系,把系统的每个往复运动分为过渡和助力两个阶段,由图 7 可知,助力阶段所占比例越大,则助力效果就越明显。 通过进一步调节控制模型中的弹性系数及阻尼系统可以改变过渡和助力两个阶段的相对占有时间。


a:右小腿

b:右大腿

6 结语
实验表明,基于人体肌肉功能模型的控制方法可以为人体下肢运动提供助力支持,该方法与假想柔顺控制方法相比,可降低系统对人-机交互信息的依赖性,但此方法需要提供必要的人体参数,如下肢各段的长度、各段的转动惯量等,因此它对人体模型的准确性要求较高。“助力多少”是对助力效果最直接的认定,是助力机器人重要性能指标之一,“助力多少”依赖于助力阶段与过渡阶段之间的相对占有时间,对“助力多少”的确定将是作者下一步研究的内容。
上一篇:基于GSM的远程医疗呼救系统设计
下一篇:数字医疗产品消费8大趋势:1/4受访者选择弃用可穿戴设备
推荐阅读
史海拾趣
|
马动力汽车,无聊的主意 在蒸汽机出现之前,马车一直都是最为重要的交通工具,虽然效率相对低下,但绝对是一种无污染的清洁动力。那么在现在油气动力如此充裕的今天,是否可以有一种全新的方式对马这一原始的动力加以利用呢? 来自迪拜的一家 ...… 查看全部问答∨ |
|
|
下了个MPLAB软件和picc软件,可总是关联不上,没办法编译文件。对照教程也不行。都弄了3天了,各种版本都试过N遍了还是不行。特此求助帮忙设置一下。或发给我一份。多谢!特谢!! … 查看全部问答∨ |
我想请教个问题:我用的是C8051F361单片机,用P14和P15脚测输入信号频率,P15我给它1.25参考电压。P14脚是输入信号。但实际效果是P15为0V. 不知道哪个大哥知道问题所在?把单片机拿掉,P15脚又恢复成1.25V.… 查看全部问答∨ |
|
两台电脑。同样的BSP 相同的project 编译出来的steploader,一个能运行,一个不能运行! 这是怎么回事呢。 wince6.0 R2… 查看全部问答∨ |
现在公司需要在WINCE下面做一个类似IE浏览器的软件 可以用MFC,可以用MFC,但是MFC下面没有CHtmlView这个类的控件啊 请问大虾怎么开发?有源代码最好,100送给他… 查看全部问答∨ |
|
$(\'swf_p78\').innerHTML=AC_FL_RunContent(\'width\', \'550\', \'height\', \'400\', \'allowNetworking\', \'internal\', \'allowScriptAccess\', \'never\', \'src\', encodeURI(\'http://player.youku.com/player.php/sid/XMzUwOTk5NjI0/v.sw ...… 查看全部问答∨ |












- MSP430 多款开发工具优惠促销,总有一款会适合你!
- 3.5\"嵌入式主板给力开团 仅售599元包邮!
- 【EEWORLD带你DIY】数字示波器V1.0进展贴
- 逛工业自动化展TE Connectivity网上展厅,答题赢好礼!
- 泰科电子工业事业部邀您云逛展 ——打破时间、空间的限制,TE Connectivity 线上工博会为您带来沉浸式VR观展体验
- 有奖直播:升升不息,瑞萨MCU的固件升级方案
- 福禄克首款热成像万用表Fluke-279FC等你来尝鲜!晒心得享好礼喽!
- 有奖直播:TI MSP430TM集成可配置信号链模块在传感测量领域的应用
- 迎端午,芯币可以兑换粽子啦!
- 【有奖分享】MPS带您快速探究电源设计秘密






 京公网安备 11010802033920号
京公网安备 11010802033920号