今年年初,特斯拉正式向公众发布了最新版本的完全自动驾驶系统FSD Beta V12。然而,尽管马斯克曾自信地宣称V12将不再处于Beta版的开发阶段,但从首批收到FSD V12更新的用户截图中可以看出,该版本的FSD V12仍然带有“测试版”标签。
与之前的版本相比,特斯拉FSD V12新增了一项功能,即自动速度偏移调整。这项功能使得特斯拉FSD能够借助AI视觉技术,根据不同的环境和场景,自主调整车辆的行驶速度。这只是特斯拉“端到端”自动驾驶功能中的一部分。在特斯拉CEO马斯克的设想中,端到端的自动驾驶方案更接近人类的驾驶模式,它将感知与驾驶决策都交给了AI,而不是传统的基于规则的驱动方式。他表示:“人类就是这样做的,通过图像输入,进行控制输出。”
特斯拉在其新版本的发布说明中指出:“FSD Beta V12是有史以来第一个端到端的AI自动驾驶系统。”马斯克在去年的试驾直播中进一步强调:“FSD Beta V12将城市街道的驾驶堆栈升级为单个端到端的神经网络,经过数百万个视频剪辑的训练,取代了超过30万行显式的C++代码。”
完美躲避静止车辆 起步博弈更自然
根据海外用户分享的视频片段,特斯拉的FSD V12在无高精地图、无判断代码、仅依赖数据训练的情况下表现优异。在雨天、无红绿灯路口、无保护左转、以及应对应急车辆等场景中,系统都展现出了卓越的性能。许多国外车主对新版本的FSD给予了高度评价,视频下的评论普遍积极。
具体来说,搭载FSD Beta V12的车辆能够准确识别路口的停车标志以及路面上的实线。在视频中,车辆在路口的停止线前稳稳地停住,等待左右两侧没有车辆时才自动起步,顺利通过十字路口。在红绿灯路口,车辆准确地识别了头顶的红绿灯信号,平稳地停在了摩托车后面等待。当绿灯亮起时,车辆迅速启动,并稍微避让了旁边靠近的车辆。
此外,FSD还在演示视频中展示了在红绿灯前大约200米处完成向右变道,减速后顺利完成右转操作,并且避开了路边临时停靠的车辆。在无保护左转(直行和左转绿灯同时亮起)的场景中,车辆跟随前车平稳起步,在对向无车的情况下快速完成了左转操作,平稳地从最左侧车道驶向最左侧车道,行驶轨迹接近圆周运动。从这两个场景可以看出,车辆成功识别了不同位置和高度的红绿灯信号,基本上没有延迟,操作也十分流畅。
面对开启应急灯或形状各异的异形紧急车辆时,FSD同样表现出色。从车辆仪表屏幕可以看到,车辆正确识别了闪烁的消防车,并正确地向右避让以避开消防车。同时,车辆也识别到了在消防车一侧缓慢行走的施工人员。在一段双车道路段上,车辆在对向车道车流不断的情况下,连续完成了越线超车和避让起步车辆两个动作,操作连接顺畅且无停顿。
不惧夜晚雨天 复杂场景不慌张
对比马斯克上次测试的版本,本次FSD V12更新后车主放出的视频补充或者说证明了几个点:1、FSD能够正确识别红绿灯和道路指示,并按照通行逻辑行驶;2、在雨天、黑夜等能见度低场景仍然可用;3、在人、车、异形物同时存在的复杂场景也不失效。
首先,我们来看看逻辑问题。马斯克上次直播演示的场景确实相对简单,而这次众多海外网友的测试显示,特斯拉FSD在处理交通逻辑方面表现得相当出色。它不仅能够遵守基本的交通规则,如路口停车、礼让行人、按照红绿灯信号行驶,还展现出了与人类驾驶者相似的逻辑思维能力。例如,遇到慢车时它会选择超车,面对无保护左转时会进行博弈,遇到应急车辆时会减速并观察情况,起步和刹车都相当平顺。这种表现已经达到了相当高的水平,几乎可以与经验丰富的老司机相媲美。
其次,我们来看看使用场景。马斯克在直播时主要展示了FSD在晴朗白天的表现,而实际测试视频中,我们看到车辆不仅在黑夜中行驶,而且面临着极大的雨刮器工作负荷。即便在这样的情况下,FSD仍然能够正常运行,这证明了它在黑夜和雨天等复杂环境下的可用性。未来,我们期待更多车主能在更极端的环境条件下测试FSD的表现,例如大雾或沙尘暴等。
最后,值得一提的是FSD作为纯视觉、端到端方案的“集大成”特性。它能成功识别并应对爆闪灯光和各种形状的应急车辆,显示出强大的环境感知和应对能力。与马斯克上次直播中回避路障的表现相比,这次FSD在行驶安全方面的表现更加出色,让人更加安心。这表明公测版本的FSD可能已经达到了“可用”的水平。随着更多车主在实际场景中使用公测版的FSD,我们期待它能进一步提升用户体验,从而真正达到“好用”的水平。
HW4.0算力更强 大模型进步速度惊人
本次公测版FSD的技术进步可能的增长点主要来源于以下几个方面:
首先,FSD Beta V12针对HW4.0平台进行了更新,这为系统提供了更强大的硬件支持。HW4.0硬件升级带来了摄像头每秒多4帧的帧率,使得系统能够更快速地处理图像数据,提高了对路面细节的识别能力。此外,HW4.0的算力相比HW3.0翻倍,这使得FSD能够进行更高效的处理和计算,加快了决策速度。
其次,FSD Beta V12采用了更为海量的数据进行训练。通过在数百万个视频剪辑上训练单个端到端神经网络,FSD能够更好地适应各种驾驶场景和应对各种复杂情况。这种基于深度神经网络的方法使得FSD能够从大量数据中学习到驾驶行为的规律和知识,进一步提高其识别和预测能力。
此外,FSD V12采用了端到端大模型技术,将感知和规范集成到了一个大模型之中。这种方案能够提高数据处理的速度和效率,使得系统能够迅速作出判断并控制车辆的行为。通过深度学习和强化学习的方法,FSD能够不断优化自身的驾驶策略,从而逐渐提高其驾驶能力和智能化水平。
最后,特斯拉的“影子模式”也为FSD的进步提供了重要支持。通过在用户驾驶过程中采集各类驾驶数据,特斯拉能够获取高价值的corner case数据,从而不断优化FSD的性能。这些数据被存储在特斯拉的数据中心中,经过数据引擎的分析和处理后,可作为系统的训练资料,进一步提升FSD的准确率和可靠性。
总之,本次公测版FSD的技术进步可能主要来源于针对HW4.0平台的更新、更海量的训练数据、端到端大模型技术的应用以及特斯拉“影子模式”的支持。这些因素共同推动了FSD的性能提升和进步,使其在自动驾驶领域取得了更大的突破。
FSD入华 V12是关键
在2021年8月,特斯拉在首次AI DAY上推出了基于Transformer技术的BEV。此后,华为、小鹏、蔚来、理想和百度等众多厂商纷纷跟进,并推出各自的基于BEV+Transformer的智能驾驶方案。尽管特斯拉在这方面具有一定的先发优势,但与中国本土车企的智能驾驶方案相比,并没有形成明显的代际差距。双方都在感知层面上通过BEV+Transformer架构实现了神经网络的基本运算,但在下游的规划和控制方面,仍主要依赖于传统的规则算法。即使是特斯拉的FSD V11,也包含了大约30万行C++控制代码。
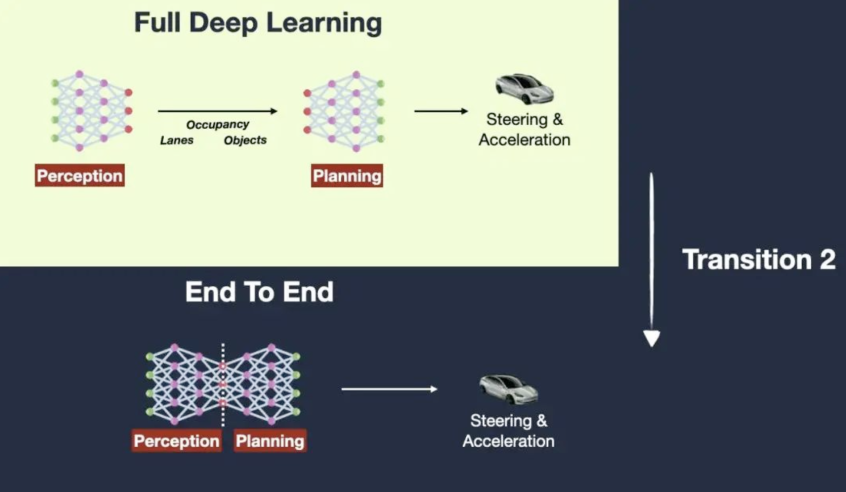
然而,随着FSD V12的推出,这一局面得到了扭转。通过实现端到端的自动驾驶技术,特斯拉成功地拉开了与中国车企的代际差距。FSD的每次大版本迭代,本质上都是将更多的子任务交给神经网络来完成,从而减少了人工规则的参与程度。FSD V12更是将几乎所有的子任务都交由神经网络处理,将人工编程的C++控制代码从V11的30万行大幅减少到仅3000行,实现了真正意义上的“完全端到端”自动驾驶。这意味着在神经网络模型中输入图像后,可以直接输出转向、加速、制动等控制指令,无需任何额外的规则代码。这种端到端自动驾驶的核心优势在于能够大幅提升模型的性能上限和训练效率。
在传统的自动驾驶中,模型的性能上限主要取决于规则代码的质量。各车企智能驾驶能力的差异,本质上源于规则代码的差异。然而,有限的代码无法覆盖无限的场景,工程师们只能在遇到边缘场景时对模型进行修补。所谓的智能驾驶,实际上并没有真正的智能可言,因为它们无法理解规则,只是按照人类设定的规则进行驾驶。
相比之下,FSD V12的端到端自动驾驶技术打破了这一限制。模型性能的上限不再由规则代码决定,而是由数据和算力所决定。端到端的智能驾驶模型可以模拟人类的思考方式,通过大量训练“学会”如何驾驶。训练数据越多、算力越强,模型的性能就越好。这甚至可能引发类似于大语言模型中的“涌现”现象,即模型在某些情况下能够展现出类似于人类的“开窍”或“厚积薄发”的能力。
借助FSD V12实现的端到端自动驾驶技术,特斯拉只需要使用丰富的本土行驶数据来训练智能驾驶模型,便能提供更出色的智能驾驶体验。同时,由于大幅减少了规则代码的使用,特斯拉无需在中国建立数千人的智能驾驶算法团队。仅需一个由20人左右的本地运营团队和数百人的数据标注团队组成的运营团队,便能确保FSD在中国市场的顺利落地和运营。
写在最后:
特斯拉本次FSD Beta v12更新将最可能无限接近人类真实驾驶的端到端大模型智驾技术推向了公众,可以说是自动驾驶行业的一个里程碑式事件。从模仿人类的驾驶行为出发,发展到今天,或许此刻的FSD可以说自己已经完成了部分超越人类驾驶行为。未来,随着FSD Beta v12被更广泛地使用,实践将证明这一系统的优劣。而大模型带来的无限学习进步的优势又将使得FSD有更长远的进步,FSD涌现正在到来,自动驾驶行业划时代一刻正在来临。
上一篇:u-blox赢得重要自动驾驶新项目 将带来超过1亿美元的收入
下一篇:华为的视觉智驾 VS 特斯拉的 EAP,谁更强?
 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练 BA4558F-T2
BA4558F-T2

Vishay线上图书馆

- LTC1871EMS-1 演示板,无 RSENSE DC/DC 控制器升压,反激/SEPIC
- 基于IP5306的单片机电源模块方案
- 来自汽车和电池输入的 LTC3126MPFE 2MHz、3.3V/2.5A 电源的典型应用电路
- FA-238V,MK10FX512VLQ12 Kinetis K应用处理器的12MHz晶体单元的振荡电路和选型指南
- 使用 Diodes Incorporated 的 PT8A3519 的参考设计
- ESP32Picoremote:带有 TFT 显示屏的 ESP32 WiFi 遥控器,迷你小电视,能够播放 GIF
- 使用 Analog Devices 的 LTC3723EGN-1 的参考设计
- 用于评估SRK1001自适应同步整流控制器、带SR MOSFET的反激式转换器演示板
- LT8705MPFE 12V 输出转换器的典型应用电路接受 4V 至 80V 输入(最低启动电压为 5.5V)
- AM1/4S-4809SZ 9V 0.25 瓦 DC/DC 转换器的典型应用






 PIC18F47Q43-I/PT
PIC18F47Q43-I/PT





 京公网安备 11010802033920号
京公网安备 11010802033920号