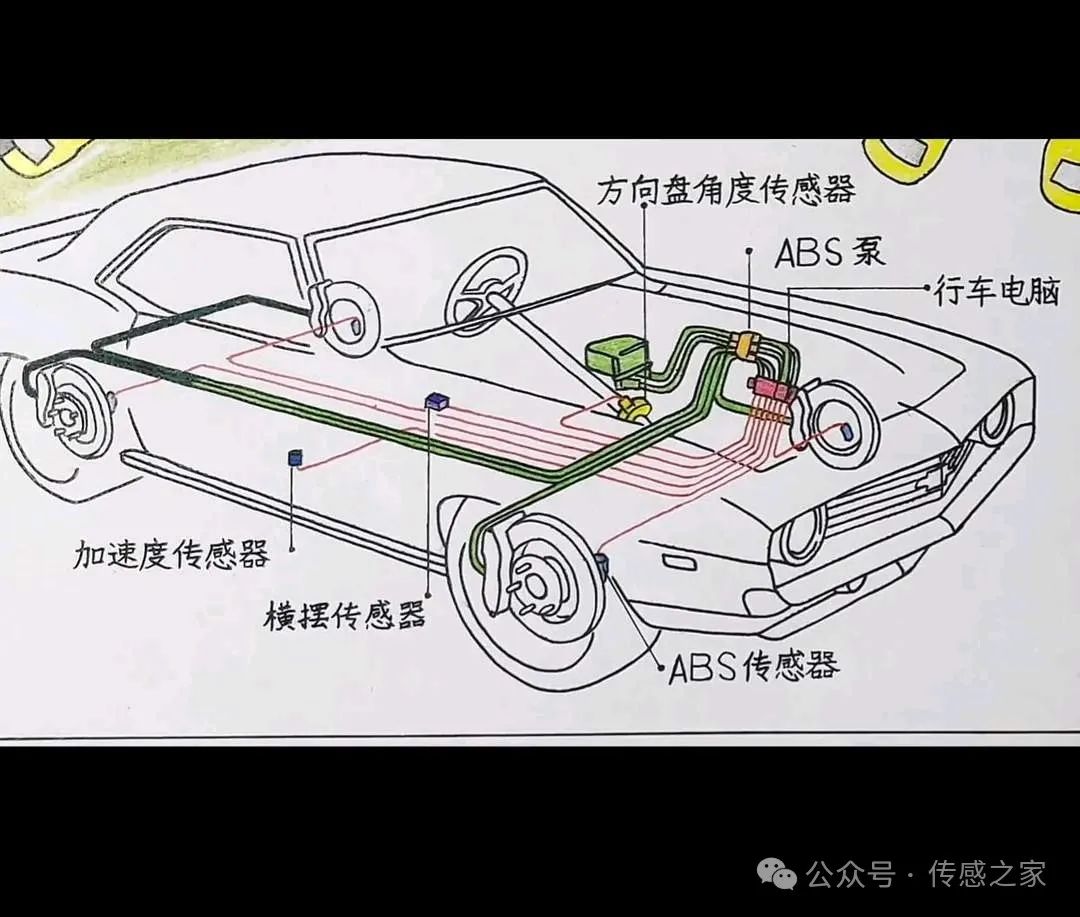
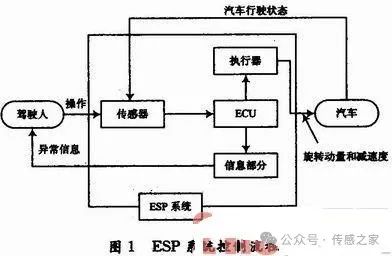
ESP 大家都不陌生,现在汽车行业已经广泛使用,ESP(EleCTRonIC Stability Program,电子稳定程序)是汽车电控的一个标志性发明。不同的公司对这一系统的命名不尽相同,如博世(BOSCH)公司、梅赛德—奔驰公司称为ESP;丰田公司称为汽车稳定性控制系统(VSC)、汽车稳定性辅助系统(VSA)或者汽车电子稳定控制系统 (ESC);宝马公司称为动力学稳定控制系统(DSC)。尽管名称不尽相同,但都是在传统的汽车动力学控制系统,如ABS和TCS的基础上增加一个横向稳 定控制器,通过控制横向和纵向力的分布和幅度,以便控制任何路况下汽车的动力学运动模式,从而能够在各种工况下提高汽车的动力性能,如制动、滑移、驱动 等。包括在新能源电动汽车 ESP 现在已经广泛使用。汽车 ESP传感器的工作原理是通过监测车辆的运动状态和驾驶员的操作,为电子稳定系统提供关键的信息,以帮助维持车辆的稳定性和操控性。以下是常见的 ESP 传感器工作原理:
1. 轮速传感器:轮速传感器通常采用磁感应或霍尔效应原理来检测车轮的旋转速度。当车轮转动时,传感器会产生与车轮转速成比例的电信号,这些信号被传输到 ESP 控制单元。
2. 转向角传感器:转向角传感器通常通过电位计或光学传感器来测量方向盘的转动角度和速度。它可以检测驾驶员的转向意图,并提供有关车辆转向方向和角速度的信息。
3. 横摆角速度传感器:横摆角速度传感器用于测量车辆围绕其垂直轴的转动速度。这可以通过陀螺仪或加速度计等原理来实现。传感器检测车辆的横摆运动,并将数据传递给 ESP 系统。
4. 纵向和侧向加速度传感器:这些传感器使用压电或电容等技术来测量车辆在纵向(前后方向)和侧向(左右方向)上的加速度。它们可以监测车辆的加速、减速和侧向受力情况。
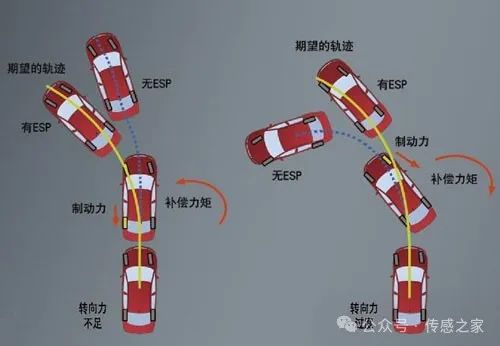
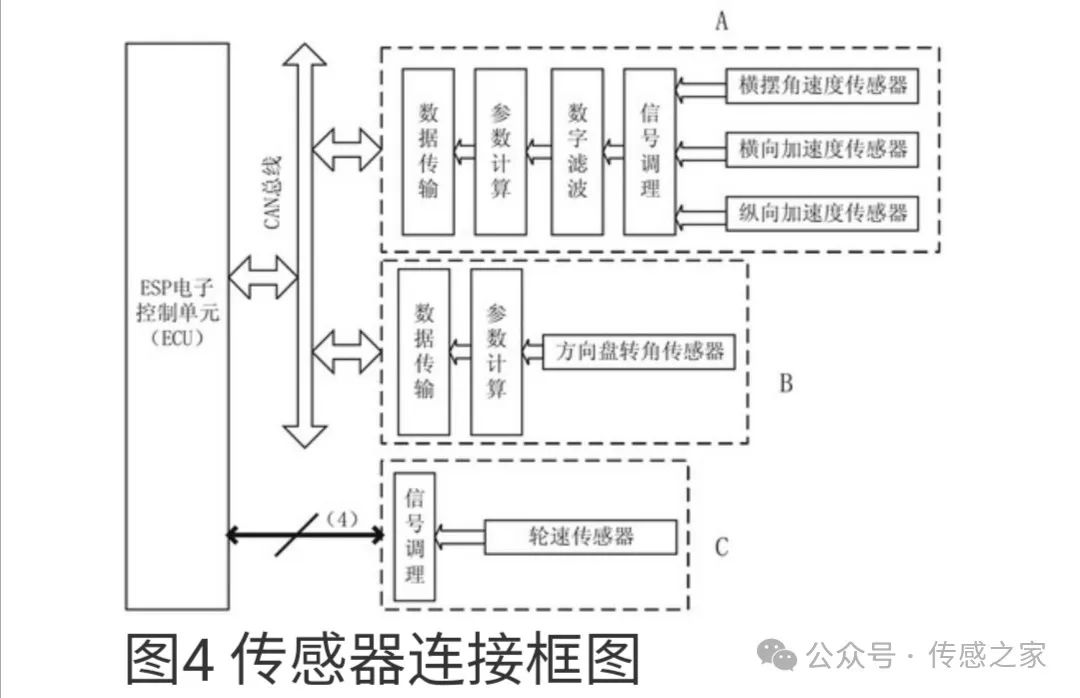
ESP 控制单元接收来自这些传感器的信号,并结合其他车辆系统的信息(如制动系统、发动机管理系统等)进行分析和处理。根据传感器提供的数据,ESP 系统可以判断车辆是否处于不稳定状态,并采取相应的控制措施,如调整制动压力、降低发动机输出等,以帮助车辆保持稳定并避免失控。通过实时监测和快速响应,ESP 传感器能够提供准确的车辆动态信息,使 ESP 系统能够及时干预并调整车辆的行驶状态,提高行驶安全性和操控性能。需要注意的是,不同车型和 ESP 系统可能会使用不同类型和工作原理的传感器,但总体目标都是为了实现车辆的稳定控制。ESP(Electronic Stability Program)接口的原理主要涉及传感器数据采集、控制器处理和执行器控制三个部分。以下是其一般原理和相关协议的简要说明:1. 传感器数据采集:ESP 系统通常使用多种传感器来监测车辆的状态,如轮速传感器、转向角度传感器、侧向加速度传感器等。这些传感器将车辆的实时信息转换为电信号,并通过接口传输给控制器。2. 控制器处理:ESP 控制器接收传感器数据,并运用特定的算法和逻辑来分析车辆的运动状态。它可以检测到车辆的不稳定情况,如打滑、过度转向或不足转向等,并根据这些信息生成相应的控制指令。3. 执行器控制:根据控制器的指令,ESP 系统通过接口向执行器发送控制信号,执行器可能包括制动系统(如制动压力调节装置)、发动机管理系统(如节气门控制)或其他相关的系统。这些执行器会采取相应的动作,以调整车辆的动力和制动力分配,从而提高车辆的稳定性。关于协议,ESP 接口通常采用车载网络通信 CAN(Controller Area Network)协议。CAN 协议是一种广泛应用于汽车领域的串行通信协议,它提供了一种可靠、高速的数据传输方式,允许不同的电子控制单元之间进行通信。
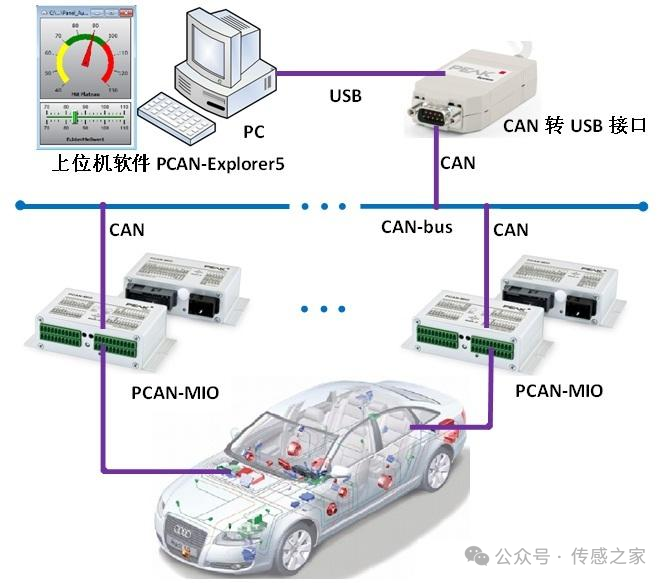
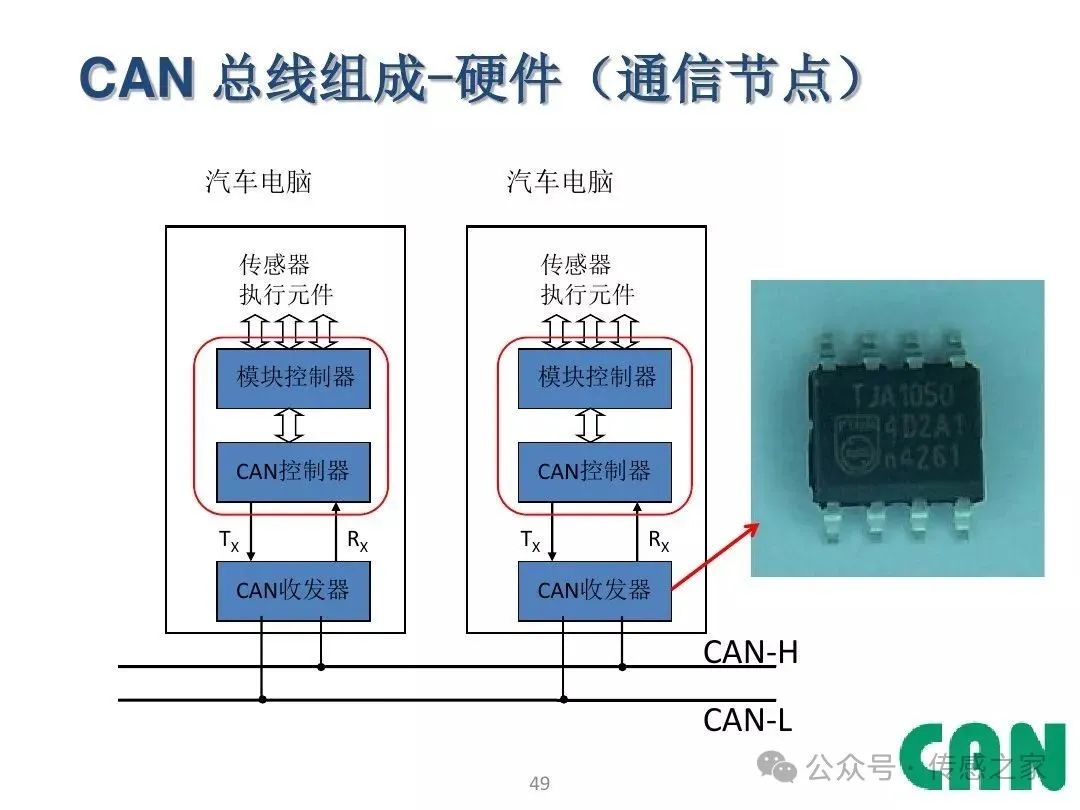
ESP 接口的协议通常采用标准化的通信协议 CAN(Controller Area Network)总线协议。CAN 总线是一种广泛应用于汽车电子系统的串行通信协议,它具有高速、可靠、抗干扰能力强等特点。通过 CAN 总线,ESP 控制器可以与车辆其他系统进行数据交互和共享,实现协同工作。
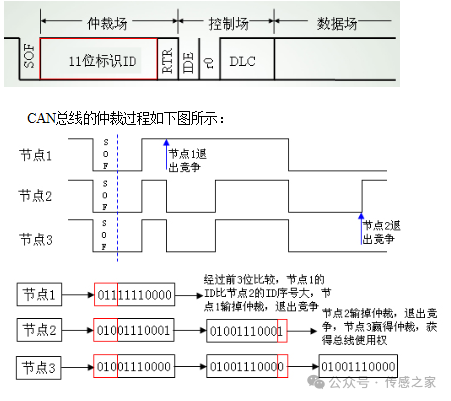
1. 多主通信:CAN 总线支持多个节点(ECU)同时进行通信,每个节点都可以主动发送数据帧。2. 非破坏性仲裁:当多个节点同时发送数据时,CAN 总线采用非破坏性仲裁机制来决定哪个节点优先发送。仲裁过程基于节点识别码(ID),ID 越小,优先级越高。3. 串行通信:数据在 CAN 总线上以串行方式传输,即按照一定的顺序逐位传送。4. 差分信号:CAN 总线使用差分信号传输,这有助于提高抗干扰能力和信号的稳定性。5. 数据帧格式:CAN 总线的数据帧包含多个部分,如起始位、仲裁域、数据域、校验域和结束位等。这些部分共同构成了一个完整的通信数据包。6. 错误检测与纠错:CAN 协议具有强大的错误检测和纠错能力,可以检测出多种类型的错误,如位错误、填充错误、CRC 错误等,并采取相应的措施进行纠错或报错。7. 标识符和数据长度:数据帧中的仲裁域包含了标识符,用于标识数据的含义和优先级。同时,数据域的长度可以根据需要进行定义。9. 通信速度:CAN 总线支持不同的通信速度,以满足不同汽车系统的需求。通过以上原理,CAN 总线实现了汽车各个电子控制单元之间的高效、可靠通信,使得各系统能够协同工作,提高了汽车的整体性能和安全性。CAN 总线协议的标准化和广泛应用,为汽车电子系统的开发和集成提供了便利。对于更详细的 CAN 总线协议原理,还需要深入研究相关的规范和技术文档。

 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用 5962-8954401GB
5962-8954401GB








 AT28HC256-70JU
AT28HC256-70JU





 京公网安备 11010802033920号
京公网安备 11010802033920号