
王飞
小鹏汽车电机控制器副总监
各位行业同人、专家,大家好,感谢电动车千人会举办这个技术交流会,我是王飞,来自小鹏汽车,主要做电机控制器的控制开发。
目前来说我重点精力部分放在我们的一些新技术研究上,那今天跟大家一起分享的课题就是小鹏新一代的一些创新技术。

我大概从三个方面跟大家做简单的汇报:
我们从车的角度讲,跟大家分享一下一些汽车领域的技术。
从车的需求角度讲,再导出我们动力总成有哪些新的趋势、新的需求。
简单的介绍一下我们最近几年做了一些控制的创新技术。

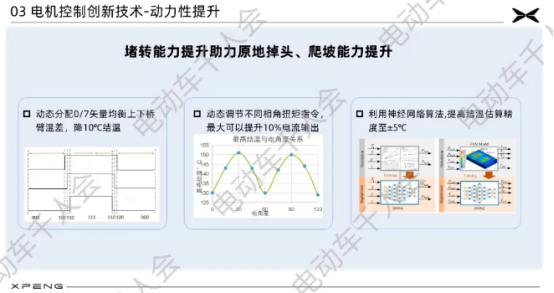
01 第一点,新能源汽车技术动向: 最近几年我们国产新能源汽车取得很好的发展,我们也可以很自信地说:国产的新能源汽车重新定位了高端智能电动车标准,主要体现在,按用户关注的点来看,这四五个部分: 首先,从长续航的角度讲,因为我们有很好的电池资源和技术的创新,本身就有一个先天的优势。 其次,充电的一些便利性,那国产汽油车不光是小鹏汽车,在座的全行业都对一些充电的适配都做得非常优异。以小鹏汽车为例,从这个小鹏汽车成立之初,公司就一直投入非常大的精力去做技术储备和研究,无论是从泊车的场景到高速的智能孵化的辅助驾驶的场景以及到现在的城市辅助驾驶,都做了很多的研究。 第三,性价比,不是我们买不起BBA,而是在国产新能源车更具有性价比。 最后,舒适度,这已经成为我们业内的标点。以小鹏的扶摇架构为例,简单跟大家分享一下我们小鹏汽车的扶摇架构有哪些特点,从动力组合的角度看,全域800V高压Sic平台、标配3C电芯同时兼容4C电芯,智能的辅助驾驶系统角度看,这是我们一直关注并重金投入的领域。此外还有一些制造领域,比如说一体式的铝压铸技术,还有CIB 的电池车身一体化。 现在详细再跟大家分享对于动力这一块我们有什么样的趋势,车对我们是什么样的诉求? 首先从高压的平台上来看,我们率先在国内运用了 800 伏SIC系统,目前做到了3C电芯兼容4C,充电功率最大可提升80%以上。采用800 伏SIC系统,我们的系统综合效率到现在已经达到92%,其中最新一代产品可能指标还要比这个高很多。包括我们在续航的申报的过程中,比如说测试到的CLTC工况,实际上我们跑出里程要远远高于 CLTC的里程。还有大家比较关注的就是在天气比较冷的时候,续航能力是削减地非常多,同时充电的效率也会大幅度降低;为了解决这个问题,我们研发的智能热管理系统,它可以使充电的效率提升90%以上,电池的散热能力也提升百分百等等。 关于智能体系主要包括以下几个方面,一个是可拓展性的电子电器的架构,第二个是小鹏的智能的辅助架构系统,我们在2023年年末的时候就已经实现,在高速的工况下,像上海到无锡这边的路程每1000公里,我们统计数据的接管率可能小于一次了。我们预计在明年的时候,可以达成在城市的路况下百公里的结果,次数可以小于一次。跟大家汇报一下,我们很多同事都开我们内部的车,一旦用到了我们的辅助驾驶,以后他对车的的指标上的需求就是带不带辅助驾驶,这个运动体验非常好,也是大大降低我们的开车的压力。从智能化的角度看,就是我们车载的智能系统,这种智能系统以我自身为例,我很难去找,我平时在设置车辆的一些功能时,都依赖我和车的语言角度去做一些调试控制,甚至车的设计底层菜单我从来没点过,那就这说明什么呢?我们车载的智能交互系统是非常人性化、非常便利的,包括说我要去接谁,那么他能直接根据车外的环境,车内的环境,包括前人乘坐的习惯,自动化的做一些智能座舱控制。 从智能制造的角度讲,刚才介绍的一体式的铝压铸技术,这项技术可以把我们的车重降低 17% 以上,这对我们的续航是有大量的提升,也会达到一个降本增效。同时CIP电池车身一体化技术,在纵向空间上可以节省空间 5% 以上。 结合多种的悬架这种系统,这里介绍从我们的平台化的服务架构衍生的企业技术,我们可以扩展到飞行领域、以及结合我们AI智驾共同探索人形机器人的发展。我相信可能还有一些其他的技术,包括我们今天或明天讲的一些小三电技术,也跟在座的同仁希望一起共同探索未来出行,这是第一个点。 02 第二点,电驱控制功能发展趋势: 首先,从电驱系统里面有一个智能驾驶,大家可能会想,我们电驱有哪些智能驾驶, 这个不应该都是智驾部门去解决的问题? 我们要判断车上有哪些痛点。第一点,我们在驾驶的时候,它都是基于一个车速传感器,再传输到我们的VCU上,才知道我们的车速,这时候从检测程度上来说,车身的四个轮子的波动特性比较大,延迟关系也比较高,那么我们采用的是直接检测到它的一个位置信号,它和我们的车速信号的精度相比更高,实现也更好,因此在极限的泊车规模下,我们就可以利用自身的优势去把我们的极限泊车提高。 除此以外还有一些制动场景下,比如说我们人为驾驶或者自动驾驶的时候,在快刹车的时候,车会有一种眩晕感觉,这本质上是源于我们车身结构,它在机械制动的时候,会有较大的不连续的刹车力,这就造成了我们刹停的时候,车会有一个强的点头效果,其实可以利用电机控制器的精细化地区控制,把这个问题解决掉。 还有一些驾驶模式,我们会通过后果分析用户的驾驶习惯。看到用户哪些操作是多余的,哪些操作会造成能量损失的。从系统级的维度去解决我们车上能量损失,最后我们发现在用户遇到某些特殊颠簸的路况,突然踩油门,其实这种刹车是没必要的,不是真正预期,它预期还是以稳定速走的。 这时候我们就可以利用电驱总成到预测的这种执行的逻辑预期,做一些补偿,后面会具体介绍,那这就是智慧驾驶模式。因此从电驱角度讲,我们也有一些智能的控制、智能的逻辑。 接下来说,电驱总成在一个平台上设计完之后,我们希望能提供更好的动力输出,比如说我们把加速的速度提升,像特斯拉做的不错,这从用户角度讲都是有很大帮助的。从控制功能上我们都有很多余量可以去发掘提升电驱效率提升,后边有详细的方案。从充电速度角度来讲,我们怎么去解决低温下的充电效果?首先就是升温的问题,其次还有装置适配问题,我们调研到市场上至少要有百分之二三十的桩是低价桩,现在已经为了解决用户充电的速率问题,我们把平台提高到800V,那怎么进行适配呢?我们开发了一些策略,就是让低压的桩通过控制器逆变器升级到800V这个高压为车辆进行充电,除此以外,我们还有提升用户充电效率的正常适配的功能,其他普通技术也可以有一些创新的。 NVH目前来说有哪些点呢?首先有急加急减切换使用的各种切换问题,有电机的阶次噪声问题,有电机啸叫问题,还有高速行驶过程中有一些抖动的问题,这些问题都是对于电驱系统能够主动去抑制掉或者帮助车身主动抑制车身的去共振的问题,从可靠性的角度讲,在硬件无法避免它失效的情况下,我们还可以采取一些策略把NVH控制在可接受范围内。 后面我们介绍可靠性运行的一些方案。最后还有驾驶品质性,以小鹏MPV为例来说,因为我们这是一个比较好打的MPV,那怎么让用户感觉和我们其他车不一样呢?我们就要挖掘每个细节点,同时我们要对标行业内所有做到这种的情况怎么样?因此我们对比后,比如出色的特斯拉车,我们发现很多NVH的指标,我们已经做的细节比他们还要多。当然我相信在座各位,各自主机厂现在也都在往这个方向去积极努力探索。 最后一点就是我们今后的成本控制,像我们现在行业内经常采用的,仅仅是两三年的期间,就由IGBT功率模块拓展到这个SIC,但是他们也有较高的成本,该怎么办呢?我们肯定是既要又要的一个思维逻辑,那我们怎么解决这个问题呢?我们就尝试着把成本降低。下一篇章我们会介绍怎么采用一定的方式去把成本降低,除此以外我们还要积极地与很多国内优秀的供应商做些过程中的集成,尽量减少体积、减少重量,去做沟通的集成控制。 03 第三点,电机控制创新技术: 效率提升方面,比如说百公里加速在效率提升,那具体的执行方案包括快速的、动态的使用控制,提高它的响应特性。极限这种调试控制,还有应用达到极致的方波控制,就可以从我们的百公里加速做到4秒的降提高到3.3秒、3.7秒、3.8秒这样的量级。 作为一个技术人员,我以上介绍的内容,一个人、一个团队都不见得全做出来,那就依赖于主机厂和在座的零部件企业一起努力把我们国产的新提升和成本做到最多,做到走出国产,国内的市场,在全球的范围内帮我们的竞争进一步的提升。以上就是汇报内容,谢谢大家。














上一篇:车企放弃自研?高阶智驾「火拼」
下一篇:我国将编制新时期智能网联汽车产业发展规划
 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南 TLV2460AIP
TLV2460AIP








 STM32G070CBT6TR
STM32G070CBT6TR





 京公网安备 11010802033920号
京公网安备 11010802033920号