



激光雷达作为众多智能设备的核心传感器,其应用已经非常广泛。如今我们能够在无人驾驶小车、服务机器人、AGV叉车、智能路政交通以及自动化生产线上频频看到激光雷达的身影,也足以说明它在人工智能产业链上不可或缺的地位。
就目前市面上的主流激光雷达产品而言,用于环境探测和地图构建的雷达,按技术路线大体可以分为两类,一类是TOF(Time of Flight,时间飞行法)雷达,另一类是三角测距法雷达。这两个名词相信很多人并不陌生,但是要说这两种方案从原理、性能到成本、应用上到底孰优孰劣,以及背后的原因是什么,也许每个人都还或多或少有所疑惑。今天小编就抛砖引玉,就这些问题做一次解析。
一、原理
三角法的原理如下图所示,激光器发射激光,在照射到物体后,反射光由线性CCD接收,由于激光器和探测器间隔了一段距离,所以依照光学路径,不同距离的物体将会成像在CCD上不同的位置。按照三角公式进行计算,就能推导出被测物体的距离。
光看原理,是不是觉得挺简单。
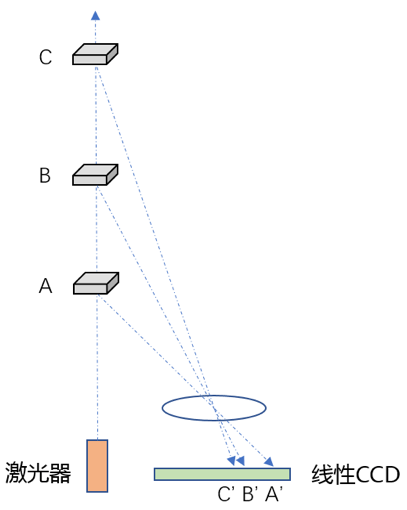
图1、三角法测距原理
然而TOF的原理更加简单。如图2所示,激光器发射一个激光脉冲,并由计时器记录下出射的时间,回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离。
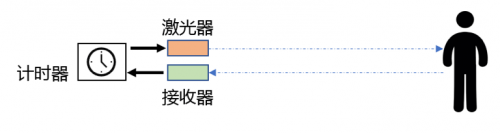
图2、TOF测距原理
可惜的是,要是所有事情做起来都如同想起来一样简单,那世界就太美好了。这两种方案在具体实现时都会有各自的挑战,但是相比起来,TOF要攻克的难关显然要多得多。
TOF雷达的实现难点主要在于:
1.首先是计时问题。在TOF方案中,距离测量依赖于时间的测量。但是光速太快了,因此要获得精确的距离,对计时系统的要求也就变得很高。一个数据是,激光雷达要测量1cm的距离,对应的时间跨度约为65ps。稍微熟悉电气特性的同学应该就知道这背后对电路系统意味着什么。
2.其次是脉冲信号的处理。这里面又分两个部分:
a)一个是激光的:三角雷达里对激光器驱动几乎没什么要求,因为测量依赖的激光回波的位置,所以只需要一个连续光出射就可以了。但是TOF却不行,不光要脉冲激光,而且质量还不能太差,目前TOF雷达的出射光脉宽都在几纳秒左右,上升沿更是要求越快越好,因此每家产品的激光驱动方案也是有高低之分的。
b)另一个是接收器的。一般来说回波时刻鉴别其实是对上升沿的时间鉴别,因此在对回波信号处理时,必须保证信号尽量不要失真。另外,即便信号没有失真,由于回波信号不可能是一个理想的方波,因此在同一距离下对不同物体的测量也会导致前沿的变动。比如对同一位置的白纸和黑纸的测量,可能得到如下图的两个回波信号,而时间测量系统必须测出这两个前沿是同一时刻的(因为距离是同一距离),这就需要特别的处理。
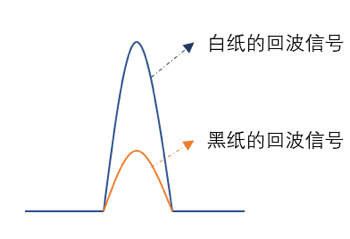
图3、不同反射率的回波信号差异
除此以外,接收端还面临着信号饱和、底噪处理等等问题,可以说困难重重。
二、性能PK,知其然可知其所以然?
说了这么多,其实从下游用户的角度,并不关心你实现起来简单还是难。用户最关心的不外乎两点:性能和价格。先说性能,如果了解这个行业的人大多知道,TOF雷达从性能上是优于三角雷达的。但是具体体现在哪些方面,背后的原因又是什么呢?
1.测量距离
从原理上来说,TOF雷达可以测量的距离更远。实际上,在一些要求测量距离的场合,比如无人驾驶汽车应用,几乎都是TOF雷达。三角雷达测不远,主要有几个方面的原因:一是原理上的限制,其实仔细观察图1不难发现,三角雷达测量的物体距离越远,在CCD上的位置差别就越小,以致于在超过某个距离后,CCD几乎无法分辨。二是三角雷达没办法像TOF雷达那样获得较高的信噪比。TOF采用脉冲激光采样,并且还能严格控制视场以减少环境光的影响。这些都是长距离测量的前提条件。
当然,距离长短并不代表绝对的好坏,这取决于具体的使用场景。
2.采样率
激光雷达描绘环境时,输出的是点云图像。每秒能够完成的点云测量次数,就是采样率。在转速一定的情况下,采样率决定了每一帧图像的点云数目以及点云的角分辨率。角分辨率越高,点云数量越多,则图像对周围环境的描绘就越细致。
就市面上的产品而言,三角法雷达的采样率一般都在20k以下,TOF雷达则能做到更高(例如星秒的TOF雷达PAVO最高可以达到100k的采样率)。究其原因,TOF完成一次测量只需要一个光脉冲,实时时间分析也能很快响应。但是三角雷达需要的运算过程耗时则更长。
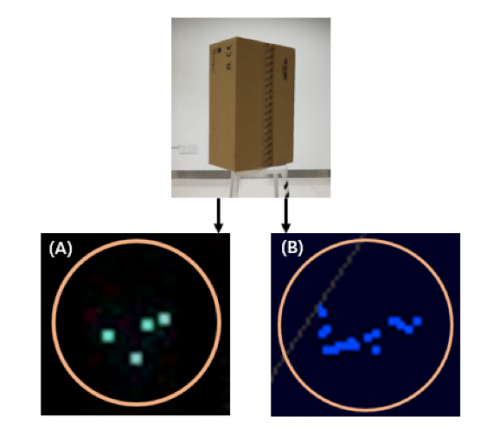
图4、对同一位置物体,不同采样率的成像效果
(A):低采样率点云图样;(B):高采样率点云图样(PAVO)
3.精度
激光雷达本质上是个测距设备,因此距离的测量精度是毫无疑问的核心指标。在这一点上,三角法在近距离下的精度很高,但是随着距离越来越远,其测量的精度会越来越差,这是因为三角法的测量和角度有关,而随着距离增加,角度差异会越来越小。所以三角雷达在标注精度时往往都是采用百分比的标注(常见的如1%),那么在20m的距离时最大误差就在20cm。而TOF雷达是依赖飞行时间,时间测量精度并不随着长度增加有明显变化,因此大多数TOF雷达在几十米的测量范围内都能保持几个厘米的精度。
2.转速(帧率)
在机械式雷达中,图像帧率就是由电机的转速决定的。就目前市面上的二维激光雷达而言,三角雷达的最高转速通常在20Hz以下,TOF雷达则可以做到30Hz-50Hz左右。通常三角雷达通常采用采用上下分体的结构,即上面转的部分负责激光发射、接收和采集,下部分负责电机驱动和供电等,过重的运动组件限制了更高的转速。而TOF雷达通常采用一体化的半固态结构,电机仅需带动反射镜,因此电机的功耗很小,并且可以支持的转速也更高。
当然,这里提到的转速的区别只是对现有产品的一个客观分析。其实转速和雷达采用TOF还是三角法没有本质的联系,主流的多线TOF雷达也都是采用的上下分体的结构,毕竟同轴结构的光学设计受到许多限制。多线TOF雷达的转速一般也都在20Hz以下。
不过,高转速(或者说高帧率)对点云成像效果是很有意义的。高帧率更利于捕捉高速运动的物体,比如高速公路上行驶的车辆。此外,在自身建图时,运动中的雷达建图会发生畸变(举个例子,如果一个静止的雷达扫描一圈是一个圆,那么当雷达直线运动时,扫描出的图像就变成一个椭圆)。显然,高转速可以更好的减少这种畸变的影响。
三、成本
如果只看性能比较,似乎TOF雷达的性能完全压过三角雷达。不过产品的竞争并不仅仅是性能参数的比拼,用户在乎的还有价格、稳定性和服务等等。
至少在成本方面,目前三角雷达的成本是低于TOF雷达的,近距离的三角雷达成本已经在百元级别。而目前进口TOF雷达的售价动辄就要万元以上。可以说,高昂的价格是限制TOF激光雷达应用进一步拓展的重要因素。
不过,随着近年来国内TOF雷达厂商的崛起,TOF雷达的成本已经得到大幅的降低,国产TOF雷达产品的价格相比于进口品牌,已经有相当大的竞争力。未来,随着生产工艺的完善和出货量的进一步提升,相信TOF雷达的成本还会进一步压缩,降到和三角雷达相近的水平也不是没有可能。
四、应用场景
三角雷达的场景主要是在室内短距离的应用,最典型的场景就是扫地机器人。而在探测范围较大场景(比如商场、机场或者车站),以及室外场景,TOF的应用则更为广泛。另外值得一提的是,三角雷达这种裸露在外转动的方案,使其产品在防尘防水方面非常脆弱,在一些特殊场景的应用,比如AVG小车工作的车间经常会有很多灰尘,在这种环境下,三角雷达的电机非常容易损坏。相比之下,TOF雷达采用的半固态设计,可以有更优秀的防护效果,工作寿命也更长。
图5、星秒TOF激光雷达PAVO
目前,国内TOF雷达正在迅速发展,星秒(SIMINICS)推出的2D TOF激光雷达PAVO,可以达到20m的测量距离,100kHz的点云速率,0.036°的最高角度分辨率,以及IP65的防护等级,其应用已经涉及到无人驾驶、机器人、AGV、安防、路政等诸多领域,是国产TOF雷达的优秀代表。
上一篇:环保与安全并重,ADI赋能汽车电动化与智能化完美融合
下一篇:雷达VS激光雷达:棋逢对手 技术对决
推荐阅读
史海拾趣
Atmel公司自1984年成立以来,便专注于微控制器及相关技术的研发。在创业初期,公司凭借其深厚的技术积累,成功开发出了基于8051内核的8位元Flash微控制器,这在当时是一个重大的技术突破。这一产品的推出,不仅奠定了Atmel在微控制器领域的地位,也为公司的后续发展奠定了坚实的基础。
在快速发展的同时,Aptina注重技术研发与专利布局。公司投入大量资源用于研发,不断推出具有创新性的图像传感器产品。这些产品不仅提升了公司的市场竞争力,还为Aptina积累了大量的技术专利。这些专利成为了公司宝贵的资产,为公司的长期发展奠定了坚实基础。
随着科技的不断进步,电子行业也在快速变革。为了应对这一挑战,Esico-Triton不断加强研发投入,特别是在人工智能和物联网领域。公司推出了一系列智能家居和工业自动化产品,以适应市场的需求。同时,Esico-Triton还与多所知名大学和研究机构合作,共同研发新技术,确保公司在行业中的领先地位。
随着市场的不断变化和技术的不断进步,晶岳电子意识到单一的产品线已无法满足市场需求。于是,在2012年,公司开始拓展产品线,研发并推出了LDO、DCDC、复位IC等电源管理芯片。这一举措不仅丰富了公司的产品线,也进一步提升了公司在电源管理领域的竞争力。同时,晶岳电子还加大了对研发团队的投入,引进了一批具有丰富经验的研发人员,为公司的技术创新提供了有力保障。
振华深知企业文化和员工激励对于企业发展的重要性。因此,公司注重企业文化的建设和传承,形成了具有振华特色的企业文化体系。同时,公司还采取多种措施激励员工积极投入工作,提高员工的工作积极性和创造力。通过员工培训和晋升机制等制度的完善和实施,振华不仅吸引了大量优秀人才加入企业,还为企业的发展提供了坚实的人才保障。
面对激烈的市场竞争,振华始终将技术创新作为企业发展的核心动力。公司投入大量资金进行技术研发,积极引进国内外先进技术,并与高校、科研机构建立紧密的合作关系。通过持续的技术创新,振华在电子产品领域取得了多项重要突破,推出了一系列具有自主知识产权的高新产品,引领了市场潮流。
|
#define uchar unsigned char#define uint unsigned int#include <reg52.h>#include <stdio.h>#include <absacc.h>sbit scl=P3^5; //24c02 SCLsbit sda=P3^4; //24c02 SDAsbit DOG=P1^7; //狗uchar x24c02_read(uchar address); //从24 ...… 查看全部问答∨ |
|
|
replyreload += \',\' + 368860;Timson,如果您要查看本帖隐藏内容请回复随着技术的发展,LED的效率有了非常大的进步。在不久的未来LED会代替现有的照明灯泡。近几年人们制造LED芯片过程中首先在衬底上制作氮化鎵(GaN)基的外延片(外延片),外延片 ...… 查看全部问答∨ |
|
|
VS2005下开发PDA。 搜了一下,说可以调用SD卡的唯一号,总之能唯一定义一套硬件的都行行。但是没找到API调用的方法…… 哪位有试过给段代码给我学习一下吧?链接也行。谢谢!… 查看全部问答∨ |
|
|
本人要用一个正弦波峰值保持(检测)电路,即输入为一小于10V的正弦波,要求输出为此波的峰值或有效值.有哪为XDJM知道的告诉我啊,小弟不胜感激!!… 查看全部问答∨ |









 R75UR32204040J
R75UR32204040J





 京公网安备 11010802033920号
京公网安备 11010802033920号