UWB技术每隔几纳秒就使用数十亿个无线电脉冲在宽频谱(至少500 MHz或中心频率的20%)上以模式形式发送。这些信号从发射机传输到接收机或发射机接收机之间传输。接收设备分析传入的模式并将其转换为数据。这不仅允许设备在短距离内快速发送数据,而且这些UWB信号还可用于精确定位设备的位置。这允许支持 UWB 的设备(例如智能手机或传感器和锚点)定位传输设备(例如另一个智能手机或资产跟踪标签),确定其确切位置,并在专用应用中启用基于位置的通信和服务。
尽管最近推出的最新一代智能手机和其他技术给人的印象是它是一种新的、最先进的技术,但 UWB 已经使用了几十年。多年来,它的使用受到限制或限制,通常以“脉冲无线电”的名义用于军用雷达和通信应用。2002 年,FCC 批准了未经许可的使用。自这一决定以来,UWB技术在创新和发展方面经历了巨大的激增,为基于位置的新型应用开辟了新的可能性。

UWB的采用率不断提高
一些最大的公司已经认识到UWB的多功能性,并开始开发或发布支持UWB的解决方案。最知名的公司之一,苹果公司首先发布了iPhone 11,该芯片配备了新的U1超宽带芯片,并将UWB集成到其技术中。三星等其他公司也纷纷效仿,将UWB集成到他们新发布的一些智能手机和其他设备中。谷歌还在努力开发一个API,可以在Android设备中启用基于UWB的应用程序。
它现在是一种经济高效的选择,其硬件组件足够小,可以适应许多不同类型的设备。NFL 甚至使用超宽带通过将 UWB 芯片连接到他们的肩垫来实时跟踪球员的位置和动作,使联盟能够分析运动员在比赛中如何在球场上移动。恩智浦和大众汽车也在探索在汽车中使用UWB的可能性,使驾驶体验更安全、更舒适、更安全。除了这些在UWB技术开发方面处于领先地位的公司外,还有各种UWB硬件供应商,为特定用例提供具有不同属性的各种UWB芯片、锚点和标签,以及UWB联盟和FIRA等协会。UWB技术将很快像蓝牙和Wi-Fi一样无处不在,一些专家预测它将取代BLE成为短距离通信和定位的领先标准。

UWB的独特优势
UWB具有许多独特的优势,使其迅速为射频技术设定了新的标准。它可以在短距离内传输非常高的数据速率,并实时确定位置。UWB 在 3.1 至 10.6 GHz 的极宽频谱范围内以高带宽运行。它还消耗很少的功率,允许经济实惠且高效的硬件选项,例如带有纽扣电池的定位器标签,无需充电或更换即可运行数年。
UWB之所以能够如此准确地定位位置,是因为通过飞行时间(ToF)进行基于距离的测量,该测量根据无线电脉冲从一个设备传输到另一个设备所需的时间来计算位置。虽然这仅适用于较短的距离,但可以以小于 50 厘米的精度(在最佳条件下,最佳分布)和极低的延迟来确定 UWB 信号的位置。其他标准,如BLE和Wi-Fi,通常不能做到这一点,而是通常通过相当不可靠的接收强度指标(RSSI)来确定位置,这些指标只显示接收到的广泛类别的“弱”或“强”信号,允许定位精度低至米范围。
发送UWB信号的低发射功率和宽频谱对周围的窄带技术几乎没有干扰。UWB似乎还表现出“不可见的本底噪声”,使其成为与窄带射频技术共存的理想选择。由于这些独特的功能,UWB正迅速成为基于位置的应用和短距离通信的室内定位的领先技术。
超宽带 (UWB) 跟踪如何工作?
UWB 可通过 ToF 确定位置。这允许通过计算信号在设备之间传输所需的时间来准确测量发射接收器之间的距离。在某些情况下,可以确定设备位置的 X、Y 和 Z 坐标,从而为 UWB 实现的定位增加了一个额外的维度。根据使用或应用领域的不同,ToF计算的确切技术可能会有所不同。
有两种主要方法可用于UWB跟踪:到达时间差(TDoA)和双向距离测量(TWR)。
到达时差 (TDoA)
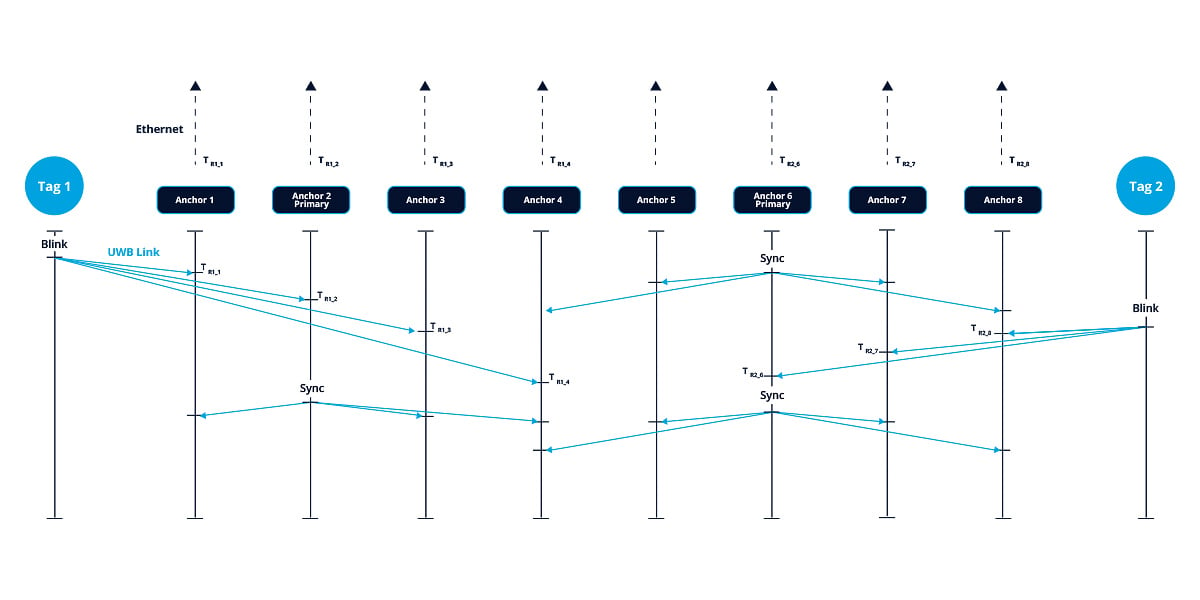
TDoA 使用放置在室内空间固定位置的 UWB 锚点或传感器。然后,这些传感器检测并定位正在传输的 UWB 设备,例如位置标签。为了正常工作,固定锚点必须精确同步,以便它们精确定时。UWB tag 或其他设备定期发送信号。这些信号由通信范围内的锚点接收,并由它们加盖时间戳。然后,所有带时间戳的数据都会发送到中央 IPS(内部定位系统)或 RTLS
定位服务器分析来自每个锚点的数据以及到达锚点的时间差异,并使用多点测量来计算标签的坐标。然后,这些坐标可用于在平面图上可视化设备的位置,或者根据应用的不同,也可以用于其他目的。
![]()
![]()
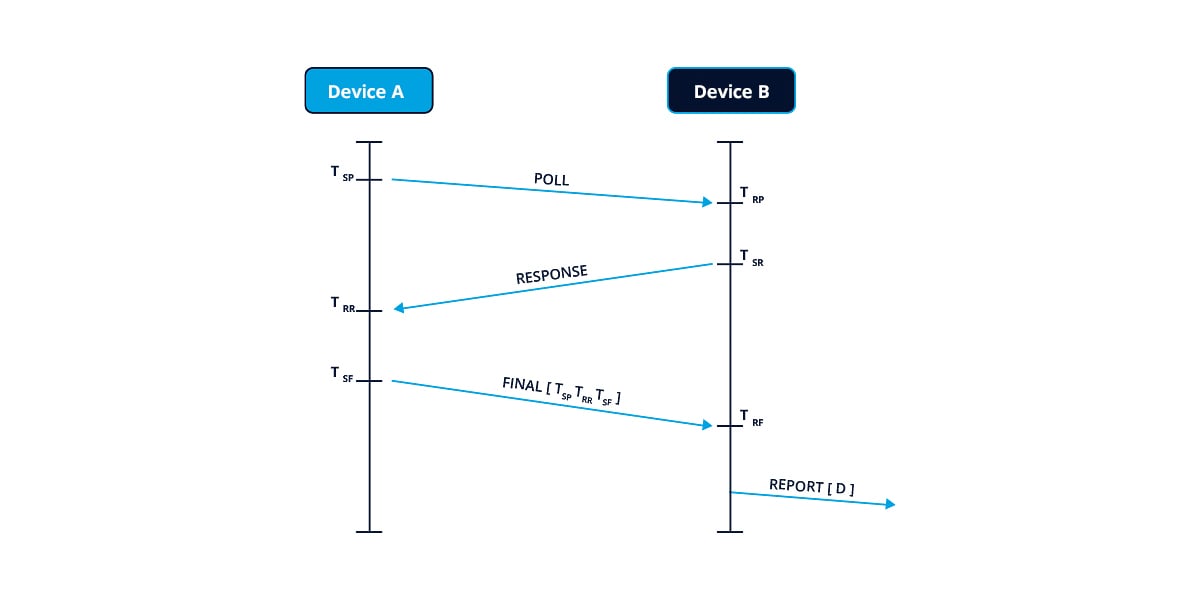
说明双向测距 (TWR) 在定位中如何工作的图表。双向距离测量 (TWR)
TDoA涉及多个固定锚点协同工作以确定移动对象的位置,而TWR主要使用两个设备(如智能手机)之间的双向通信来确定它们之间的距离。使用TWR,当两个设备彼此靠近时,它们开始测量彼此的距离并确定彼此之间的距离,同时它们仍在相互通信。然后,信号在它们之间传播所需的时间乘以光速,并用于确定它们的相对位置,通常用于实现基于位置的通信。
然后,根据具体应用,从一台设备到另一台设备确定的位置可用。TWR 也可以由固定锚点和 UWB 设备使用,但 TWR 方法一次只能使用一个伙伴进行距离测量来定位设备。
UWB跟踪的准确性如何?
UWB 能够通过 ToF、快速纳秒脉冲进行检测,并限制对其他无线电传输的干扰,从而实现精确的室内定位,精度小于 50 厘米(在最佳条件下,最佳分布),实时结果还可以快速捕获设备的运动和活动。
与其他室内定位技术相比,UWB的定位精度要高得多。其他标准通常使用接收信号强度指示器 (RSSI) 来确定位置,并且通常只能以米级精度运行,例如 BLE(< 5 米)和 Wi-Fi(< 10 米)。一些UWB技术还可以使用到达角(AoA)通过无线电方位更精确地确定位置,这需要具有多个天线的设备来测量输入信号的角度。
UWB的覆盖范围有多大?
UWB 可以确定设备在不到 200 米的距离内的位置。但是,它在短距离内(通常在 1-50 米之间)最有效,并且在设备或锚之间的视线范围内效果最好。在短距离内,UWB 以最小的中断提供高度准确、快速和安全的通信。
应用设计

北京市海淀区知春路23号集成电路设计园量子银座1305 电话:(010)82350740
电子工程世界版权所有
京ICP证060456号
京ICP备10001474号
电信业务审批[2006]字第258号函
 京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved

