准确的室内定位是许多机器人应用(从仓库管理到监控任务)的关键支持技术。特别是超宽带 (UWB) 定位技术已被证明可以提供稳健、高分辨率和穿透障碍的测距测量。尽管如此,UWB 测量仍然受到非视距 (NLOS) 通信和甜甜圈形天线辐射方向图造成的空间变化偏差的影响。在 最近的工作中, 提出了一种轻量级的两步测量校正方法,以提高基于TWR 和TDoA的 UWB 定位的性能。 将 的方法集成到 Crazyflie 上的扩展卡尔曼滤波器 (EKF) 中,并演示了闭环位置估计性能,均方根 (RMS) 误差约为 20 厘米。

UWB 室内定位系统框架的示意图。
方法
UWB 测量误差可分为两类:(1) 由 UWB 天线方向图限制引起的系统偏差;(2) 由于 NLOS 和多径传播引起的杂散测量。 提出了一种利用机器学习(解决(1))和统计测试(解决(2))的两步 UWB 偏差校正方法。 的方法的数据驱动性质使其对其所纠正的测量误差的来源不可知。
(1) 神经网络偏差校正
环形天线辐射方向图导致锚点和标签的相对姿态对接收信号功率产生显着影响,从而导致系统性、可预测的偏差。为了凭经验证明因改变锚点和标签之间的相对姿态而产生的系统测量误差, 将两个 DWM1000 UWB 锚点放置在 4m 的距离处,并收集安装在 Crazyflie 旋转顶部的 UWB 标签的 TWR 和 TDoA UWB 范围测量值它自己的 z 轴。
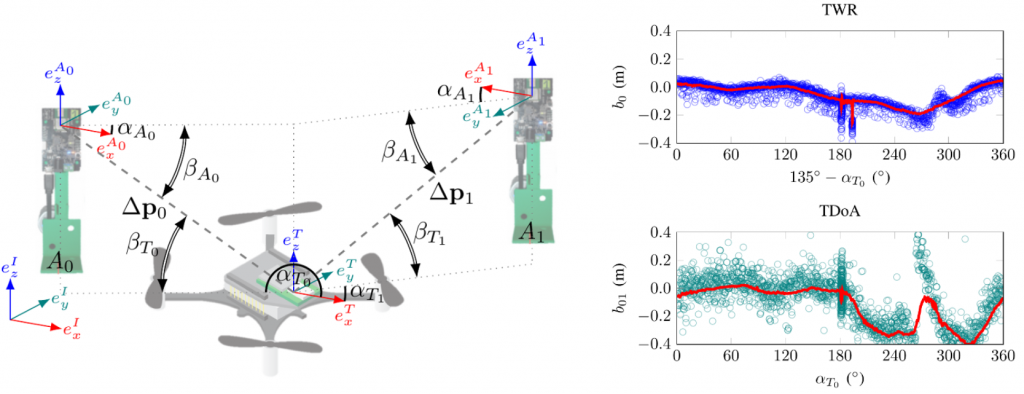
左:范围 (Δ p ’s)、方位角 (α’s) 和仰角 (β’s) 的示意图,定义了收集系统偏差测量值时标签 T 和锚点 A 0、A 1的相对姿态。右图:神经网络相对于标签朝向锚点 T 0、α T0的变化方位角的推断偏差(红色),根据 UWB 原始测量值绘制。
利用神经网络的非线性表示能力来学习仅取决于锚标记相对姿势的系统偏差。考虑到板载计算能力有限, 选择了一个全连接神经网络,两层各有 50 个神经元,并具有 ReLU 激活。为了表示 UWB 标签和锚点之间的相对位姿, 选择四轴飞行器的相对距离 Δ p以及横滚角、俯仰角和偏航角作为网络的输入特征x 。由于 使用固定锚点,因此 不将它们的姿势作为输入(这种级别的泛化留给未来的工作)。给定足够的训练数据,空间变化的测量偏差可以通过训练的神经网络捕获的非线性函数 b=f( x ) 来描述。
(2) 异常值(杂散测量)拒绝
除了基于学习的偏差校正之外, 还使用四轴飞行器的动态模型来过滤不一致的 UWB 范围测量。给定估计速度v和最大加速度a max , 可以计算四轴飞行器在时间 Δt 期间可以覆盖的最大距离 d max 。基于此信息, 可以通过将测量创新与 d max进行比较,在将无法实现的测量融合到 EKF 之前拒绝它们。
此外,使用统计假设检验来进一步对潜在的异常值测量进行分类。由于假设测量新值向量根据多元高斯分布分布,因此其值的归一化平方和应遵循卡方分布。使用卡方假设检验来确定测量创新是否可能来自该分布。
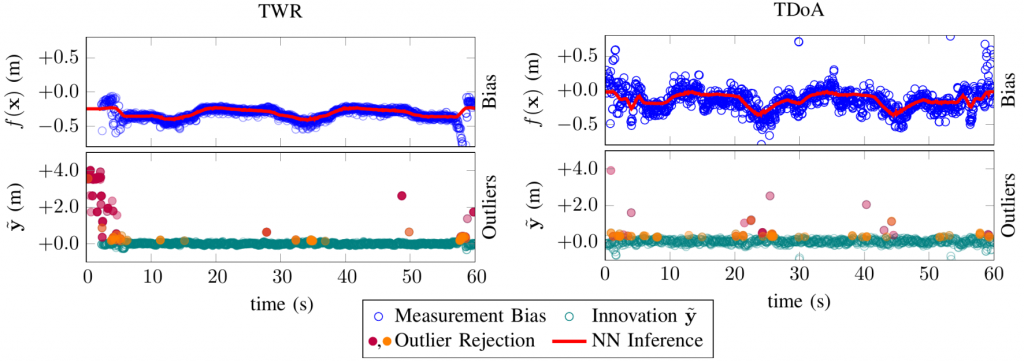
与实际测量误差(蓝点)相比,经过训练的神经网络(红色)的UWB 测量偏差 f ( x ) 预测性能以及基于模型的过滤(紫色点)和统计验证(橙色点)的作用在 60 英寸飞行实验中拒绝异常值测量创新(青色点)。
数据收集和培训
使用 Crazyflie 2.0 四轴飞行器和Loco 定位系统(LPS) 的 UWB DW1000 模块作为 的研究平台。 的校准方法在 FreeRTOS 实时操作系统中的 Crazyflie STM32 微控制器上运行。 为一个长方体飞行场地配备了 8 个 UWB 锚点,每个顶点一个。使用徕卡全站仪经纬仪测量锚位置。
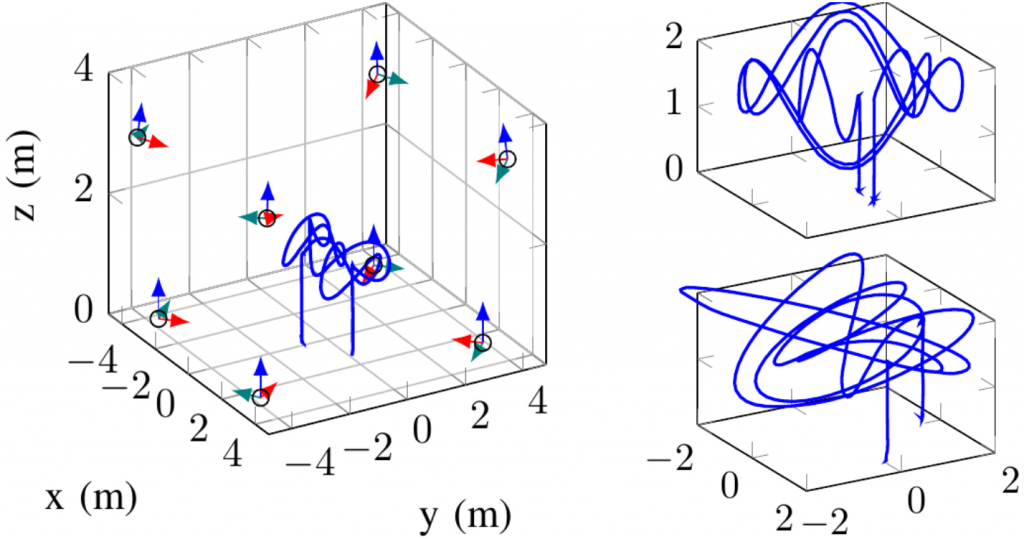
左:飞行场地的三维图,显示了八个 UWB DW1000 锚点的位置和姿势(每个锚点都面向自己的 x 轴,即红色方向)。右:飞来收集样本的两条训练轨迹,用于训练基于神经网络的偏差估计器
对于所有实验,Crazyflie 的地面真实位置由 10 个 Vicon 相机提供。使用PyTorch训练神经网络。为了在 Crazyflie 的微控制器上执行推理, 在简单的 C 重新实现中重复使用 PyTorch 的训练权重。由于 LPS 中的 DW1000 模块每 5 毫秒提供一次 UWB 测量,因此神经网络推理在飞行期间也以 200Hz 运行。 的离群值拒绝方法也在普通 C 中实现,并与板载 EKF 合并。
闭环位置估计性能
通过沿着平面和非平面圆形轨迹(不属于用于训练的轨迹)飞行 Crazyflie 四轴飞行器来演示所提出方法的位置估计和闭环性能。在 的TWR和TDoA2模式实验中,对 (A) 通过异常值拒绝增强的 UWB 定位估计和 (B) 通过异常值拒绝和神经网络偏差补偿增强的估计误差进行了比较。 以 0.375m/s 的目标速度重复所有实验 10 次。这些飞行测试期间的四轴飞行器轨迹如下图所示。
对于两个参考轨迹(平面和非平面圆形轨道)和两种 UWB 模式(TWR 和 TDoA),使用(蓝色)和不使用(橙色)神经网络偏差校正的方法的飞行路径和跟踪性能。RMS 估计误差的分布总结为箱线图。基于 TWR 的测距比 TDoA 具有更好的定位性能。然而, 观察到,通过神经网络偏差补偿,TDoA 定位的平均 RMS 误差约为 0.21m,这与基于 TWR 的定位 (~0.19m) 相当。由于神经网络偏差补偿,TWR 和 TDoA 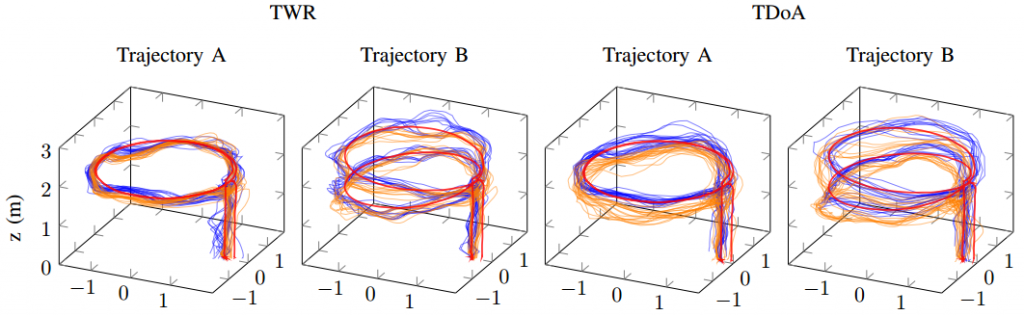
RMS 的误差平均减少约 18.5% 和 48%。最值得注意的是,这一结果表明偏差补偿可能有助于缩小基于 TWR 和基于 TDoA 的定位之间的性能差距。
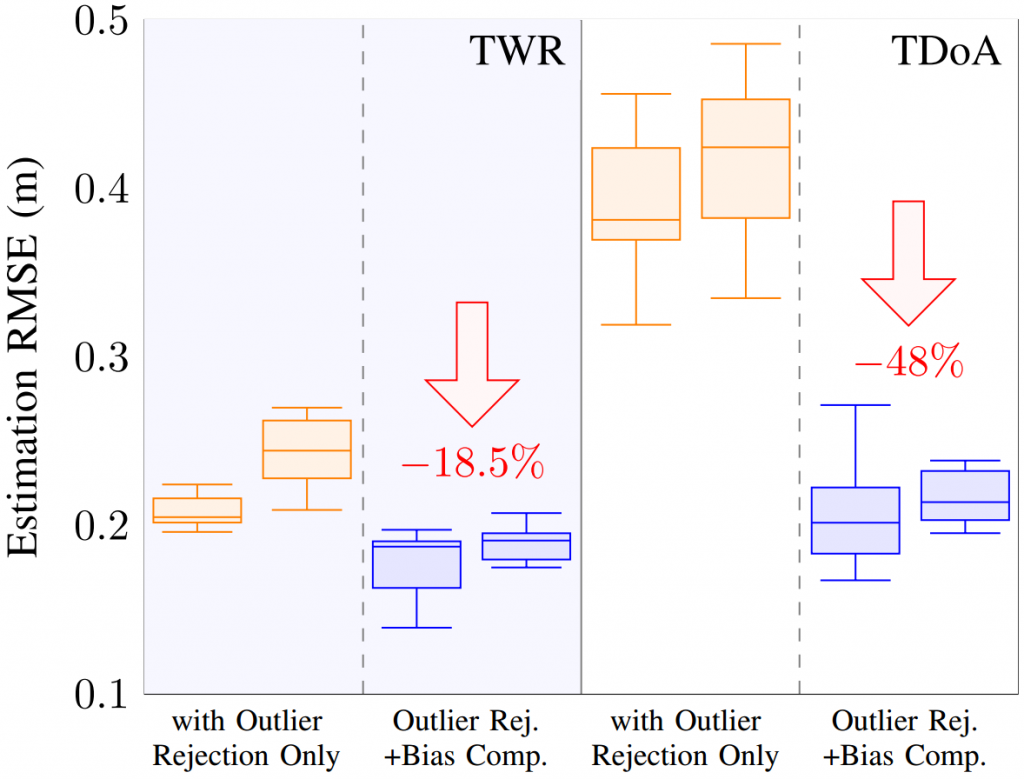
TWR 和 TDoA 测距模式的神经网络校准步骤之前(橙色)和之后(蓝色)四轴飞行器位置估计的均方根误差 (RMSE)。每对箱线图均指平面参考轨迹(每对左侧)和具有变化 z 的参考轨迹(每对右侧),显示后者具有更大的性能增强。
应用设计

北京市海淀区知春路23号集成电路设计园量子银座1305 电话:(010)82350740
电子工程世界版权所有
京ICP证060456号
京ICP备10001474号
电信业务审批[2006]字第258号函
 京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved

