1、输出功率低
按802.15.4a的协议规格, UWB的输出功率为-41dBm/MHz,按500MHz理解,总积分的功率为-14dBm,对 WiFi而言,按20MHz 计算,一般功率在100mW,也就是20dBm,其功率是大概是UWB 的2000~5000 倍。
2、穿透性
UWB 能有效穿透墙体等,但会带来一定的信号衰减。下面的表格为工作在信道2 (4G Hz为中心频点)下的穿透带来的信号衰减。

3、多径识别
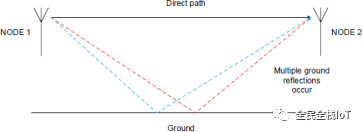
什么是多径:

电磁波从发射端到接收到,可能是直接传送,也可以能是通过发生到到目标,在一般的窄带通信中,一般处理信号强度最强的一个,不一点是最先到达的信号。而在UWB 通讯中,根据时间差,能准确识别第一个达到(First Path)的信号。但在直接或穿透达到的时候,只能认为第一个多径达到的信号。

UWB 和所有的其他电磁波信号一样,是无法穿透金属的。典型多径:

多径识别:

4、精度
关于精度,主要涉及到下面的三个精度。
a、测距精度:测距的精度,主要影响的因数有两个,一个是所采用的测距算法,另外一个方面是所采用的时钟精度,测距算法,主要是采用SDS-TWR,尽可能消除由于时钟偏差带来的误差:时钟精度:在测距系统中,可以选择用0.5PPM的时钟TCXO,带来更好的精度。测距精度可以控制在10厘米内。可以通过采用TCXO等方法来改善精度
b、ToF 距离偏差ToF是电磁波在介质中飞行时间。在通常情况下,按光速计算,但由于电磁波穿过其他介质,其传输速度会低于光速,导致所得到的时间超过实际距离在空气中传播的实际。


c、时间同步精度
在沃旭的无线定位系统中,支持通过测距的方式和TDOA的方式,在TDOA的方式下,所有的定位基站需要通过无线的方式实现同步。系统的同步精度达到0.3ns。和有线同步的方式相比,极大地简化了系统,并且系统可以无限制扩展,不会受到有线距离的控制。也简化了项目实施的难度。
d、定位精度定位精度为0.3米。系统定位,受到多种环境因素的影响,而不是测距能达到10厘米的精度,定位就能达到10厘米的精度。定位要达到10厘米的精度,只能在实验室里面不受任何干扰的理想环境。任何一个信号的扰动,都可能给系统带来的偏差。
5、冲突与避免
a、射频冲突
在DW1000 的设备中,其射频不支持冲突侦听避免(CSMA)机制,若两个标签同时测距,会导致射频冲突。由于采用双向测距的方式,根据配置不同,其测距持续的时间也不同。

b、自由冲突
自由冲突,只能是标签比较少的情况下,在只有18%的占空比的情况下,有97%的几率不会冲突。所有,在测距的模式下,所有标签按1Hz (1秒一次的频率进行测距)工作,用6.8Mbps的速率, 180ms/8=22.5,也就是说,不能超过22个标签。实际使用不能超过20个标签。所以,这只能用在地容量的场景。
c、可控冲突
若为了提升系统的容量,可以采用冲突控制的方式,增加一个射频来实现控制标签,轮流测距,这样最高可以实现1000ms/8=125 个标签和基站的测距。
关于测距
1、测距方法
在测距系统中,采用对称双边双向测距Symmetric double-sided two-way ranging (SDSTWR)

这种测距方式的误差主要取决于下面几个因素:
a、设备A、B 的时钟误差;
b、设备处理的平均延时时间

2、典型测距场景
在很多常见下,需要应用到无线精确测距,这里主要有点对点测距,点对多点测距,空间自由测距三种模式,满足各种场景中的不同应用。
2.1、点对多点测距
主要应用在两个设备之间的测距,这种测距最为简单,测距精度较好,便利性强。因为测距是最为基本的功能,可以基于测距进行二次深度整合。比较典型的应用是比如行车在运行中,需要知道其精准位置,可以通过测距完成;囚犯在保外就医等,狱警可以通过精确测距,可以通过测距把囚犯控制在安全距离之内,管理人员也可以通过平台确保无徇私行为;无人机和之间进行精确测距,可以进行无人机跟拍等:旅行团可以通过UWB 控制每个人和导游之间的距离,确保无人跟丢。
2.2、 空间自由测距
空间自由测距是一种比较特殊的测距模式,主要是所有目标在空间中都是一种处于运动的状态,设备每次测距测距前,需要了解周围有谁;测距的目标比较多的情况下,需要做好分配,避免他们之间相互干扰,最终都无法进行测距。
空间自由测距主要用于下面两个目标:
1、空间关系网的形成,比如无人机编队,可以所有目标之间的空间距离,形成自组网,在没有GNSS系统的时候,可以借助UWB 形成空间编队的位置关系网;

若此系统应用在无线通讯的Mesh网络中,也能为Mesh提供距离参数作为决策手段。
2、防撞,比如在火车轨道上行走的维修机车,可以基于这种动态测距形成另外一种保障。
关于定位
3.1、定位维度
定位维度是根据现场应用需要和现场客观情况进行选择。零维场景主要是用于出入的判断,一维场景主要是长宽比例不协调的场景,典型为隧道场景,在工厂也会存在一维场景,在一维场景下,被定位目标会被拉到一条线上;二维场景是定位出XY坐标,没有高度信息;三维有高度信息,但需要在系统建设的时候,基站需要具有高度差,才能保障到在Z 轴有一定的精度。
3.2、零维
在UWB定位中,要保证比较好的零维定位,一般是通过测距实现,用于距离限制,比如距离基站多少米内,都认为是进入了零维区域。

3.3、一维
一维定位可以用ToF, TDoA或融合AoA等技术实现,即使不在两个基站形成的直线上标签,也会被定位在这条直线上。
实际位置情况:

定位结果:
3.4、二维
二维定位会显示出被定位目标的XY坐标,若基站安装高度一致,其标签的安装高度不会影响到定位的结果。
![]()

3.5、三维

三维得到的结果是XYZ的三维坐标,若基于测距的方式,基站安装的高度差需要得到保障,另外一种就是通过AoA的方式,但AoA的角度分辨需要在Z 轴上,才能有Z 轴的精度。

定位方法
目前, UWB 定位主要是通过 TOF 测距定位,TDoA定位, AoA定位,前面两种一般可以单独使用,后面的 AoA一般是和 ToF 或 TDoA 进行融合定位。4.1、ToF定位
ToF定位是基于测距的方式,标签和每个需要定位的基站发起测距,测距完成后进行位置计算,零维模式下,只需要和一个基站测距即可;一维模式下,至少需要和一个基站测距;二维模式下,一般需要需要三个或以上基站测距,特殊模式下可以和两个基站测距。三维需要和 四个基站进行测距;
一维特殊情况,将基站放在最顶端,只需要和一个基站测距也可以完成一维定位。
二维特殊情况,可以只和两个基站测距
一般情况下二维定位

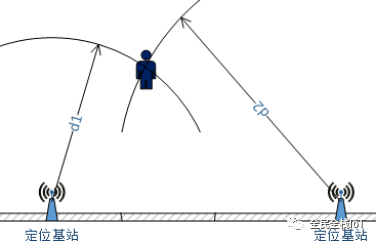
4.2, TDoA定位
TDoA是基于到达时间差定位,系统中需要有精确时间同步功能。TDOA的首要问题是解决时间同步问题,时间同步有两种,
一种是通过有线做时间同步,有线时间同步可以控制在0.1ns 以内,同步精度非常高,但由于采用有线,所有设备要么采用中心网络的方式,要么采用级联的方式,但增加了网络维护的复杂度,也增加了施工的复杂度,成本升高。并且,系统中还有一个专用的有线时间同步器,价格昂贵。
一种是通过无线做时间同步,采用无线同步一般可以达到0.25ns,精度稍逊于有线时间同步,但其系统相对来说更为简单,定位基站只需要供电,数据回传可以采用WiFi 的方式,有效降低了成本,基站时间同步之后。标签发送一个广播报文,基站收到之后,标记接收到此报文的时间戳,将才内容发送到计算服务器,计算服务器更加其他基站的定位报文的时间戳,计算出被定为目标的位置。

4.3、AoA定位
AoA定位一般是基于相位差的方式计算出到达角度,一般不单独使用,由于AoA涉及到角度分辨率的问题,若单纯AoA定位,若离基站越远,定位精度就越差。AoA可以配合ToF测距时下定位,此模式下,单基站就可以完成定位。

也可以两个基站通过AoA实现定位


4.4、定位方法的选择定位方法选择涉及到多方面因素,在系统中需要综合判断,以更好地满足系统的使用。
4.4.1 容量因素在基于测距模式,相对来说容量比较低;在TDOA模式下,若采用6.8Mbps的传送速率,标签的报文限制在12个字节内,每个报文的持续时间为95微秒,按18%的系统占空比计算,每个标签按1Hz的频率工作,系统容量接近1500个标签。若ToF配合AoA使用,能显著提升系统融合,比如,只和其中一个基站测距,其他基站辅助做角度判断,完成定位,系统容量能显著提升。
4.4.2 定位模式与功耗这里主要比较一下ToF和TDoA两种模式下的功耗, ToF模式下,标签需要逐一和基站测距,需要多次测距一般一轮测距下来,需要5ms 以上。TDoA 定位,标签只需要发送一个报文即可完成定位,一般从准备到发送完成也在0.5ms 内完成,其功耗显著低于ToF 模式。
4.4.3 环境因素
环境因素是多方面的,最为典型的是区域内定位和区域外定位:由于TDoA是基于到达时间差,将到达时间差转换为距离差之后,一般采用双曲线算法而双曲线算法的局限性决定了在基站围成的区域内定位精度高,在区域外定位精度比较差。而类似电厂等环境复杂的场景,系统面临建设的巨大难度,用TDoA定位就很难满足应用的需求。这种模式下,可以采用ToF定位,或采用TDoA融合AoA的定位方法解决。
4.5、位置计算
位置计算有多种模式可以选择,典型的主要有下面四种:

第一种,在服务器上做计算,这是比较常规的应用;
第二种,在基站上做计算,这是被定位目标比较少的情况下,可以有效节省成本
第三种,在标签上做计算,这种主要是用在机器人,无人机的定位模式下,需要快速反应,将计算结果输出到目标平台;
第四种,自主空间定位,所有的设备各自计算,用于空间自组网。
4.6、系统功耗
除了定位模式的差异之外,还有一些其他影响功耗的因素由于基站一般有交流电直接供电,标签基本上是用电池供电,其电池待机时长是一个重要指标。影响功耗的主要因素:
1、工作时间工作时间分两个,一个是发送时间,一个是接收时间,要特别说明的是,DW1000 在接收模式下,其功耗更高.工作时间占空比越大,系统功耗越高;
2、系统恢复时间一方面是CPU 的恢复时间,另外一个方面是DW1000 的恢复时间,目前DW1000 恢复需要接近7ms:
3、工作频度工作频度越高,耗电越多,比如1秒工作一次,即工作频度为1Hz,若要降低功耗,可以调整到0.5Hz,甚至0.01 Hz.
4、 智能休眠
在不运动的时候,采取降低定位频率或不再定位的方法,来有效降低功耗。在硬件设计中,增加运动传感器实现此功能,当被定位目标静止的时候,降低定位频率,重新运动的时候,把设备再唤醒,能有效降低设备功耗,最为典型的是对物的定位。
4.7、定位系统一般架构

在这个方案中,典型是本地做位置计算,将业务运营和管理放入云端服务器,本地管理终端和手机可以通过网络接入到云端。
应用设计

北京市海淀区知春路23号集成电路设计园量子银座1305 电话:(010)82350740
电子工程世界版权所有
京ICP证060456号
京ICP备10001474号
电信业务审批[2006]字第258号函
 京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2022 EEWORLD.com.cn, Inc. All rights reserved

